次のソフトウェアがインストールされていることを前提条件とします。インストールのパスが異なる場合は適宜読み替えて下さい。
|
Visual Studio 2017 Professional/Community を使う場合は、 「C++ によるデスクトップ開発」の「Windows 8.1 SDK と UCRT SDK」オプションが必要 |
| 実行ファイルのパス | C:\opencv\bin | <-- 環境変数のPathに追加しておくこと |
| インクルードファイルのパス | C:\opencv\include | |
| ライブラリのパス | C:\opencv\lib |
| インクルードファイルのパス | $(KINECTSDK20_DIR)inc | |
| ライブラリのパス | $(KINECTSDK20_DIR)Lib\x64 |
今まで説明してきたのはKinect V2の機能を使う DLL ファイルの作り方でした。 利便性を考えて、NtKinect の機能をフルにDLL化したライブラリを作成しておきます。
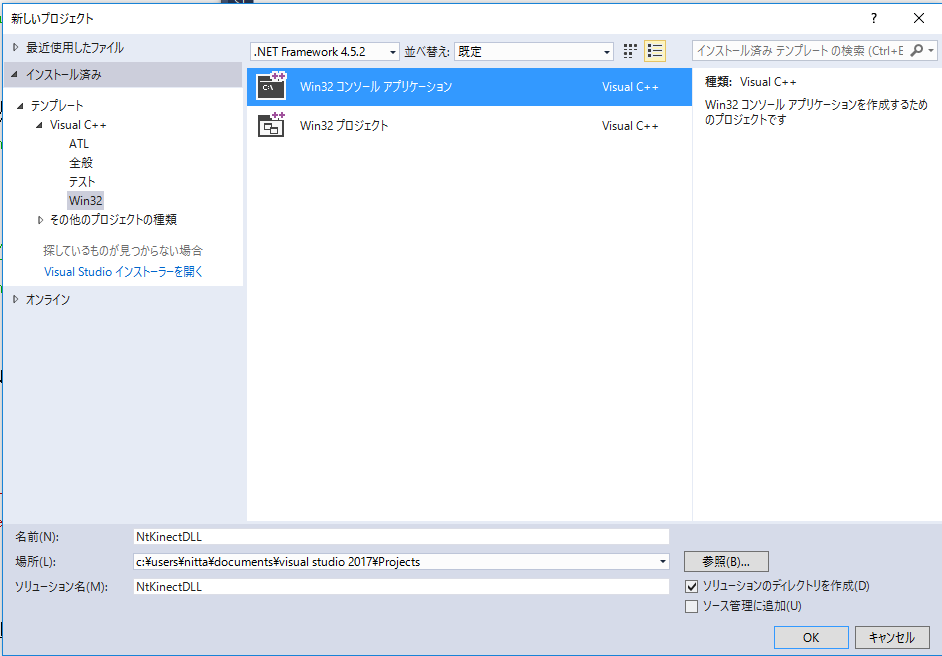
NtKinectを利用して OpenCV や Kinect V2 を使う DLL ファイルを作成してみましょう。 Visual Studio Proefssional 2017 では C++ で DLL を作成するプロジェクトのテンプレートが用意されています。
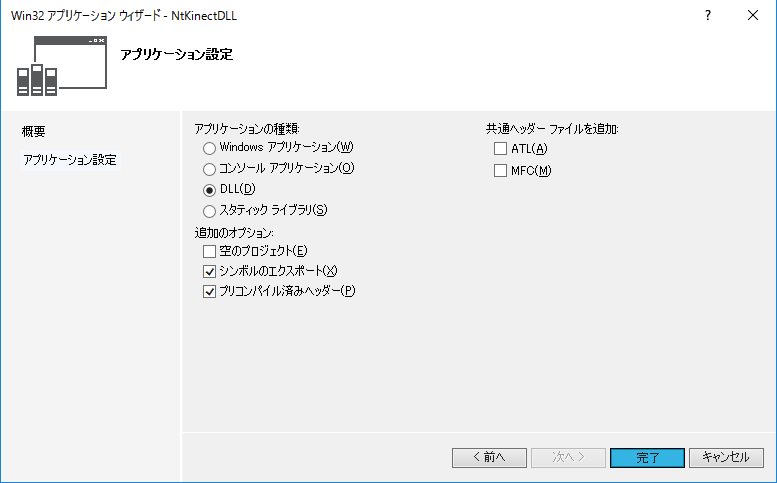
OK -> 次へ を選択して「アプリケーションの設定」へ
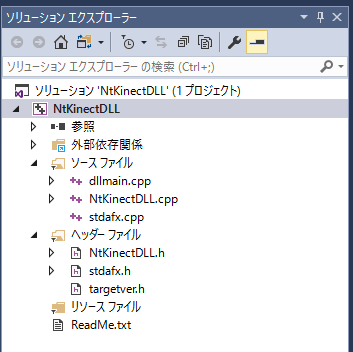
変数、関数、クラスの記述例が既に挿入されていますので、それを参考に記述します。 宣言の先頭につける "大文字のプロジェクト名_API" (この場合だと "NTKINECTDLL_API" になります) はここで定義されています。
変数、関数、クラスの記述例が既に挿入されていますので、それを参考に記述します。 例からわかるように、宣言の先頭に "大文字のプロジェクト名_API" (この場合だと "NTKINECTDLL_API" になります) を記述する必要があります。 これは NtKinectDLL.h の中で定義されているマクロで、 DLL から export したり import したりする場合を区別せずに記述するために使います。
NtKinect の機能の大部分を利用できるDLL ライブラリを作成します。 この DLLライブラリは NtKinect のほとんどの関数を呼び出せるようにするのが目標です。
名前はここでは NtKinectDLL とします。ソリューション名も自動的に NtKinectDLL となります。 OK -> 次へ を選択して「アプリケーションの設定」へ

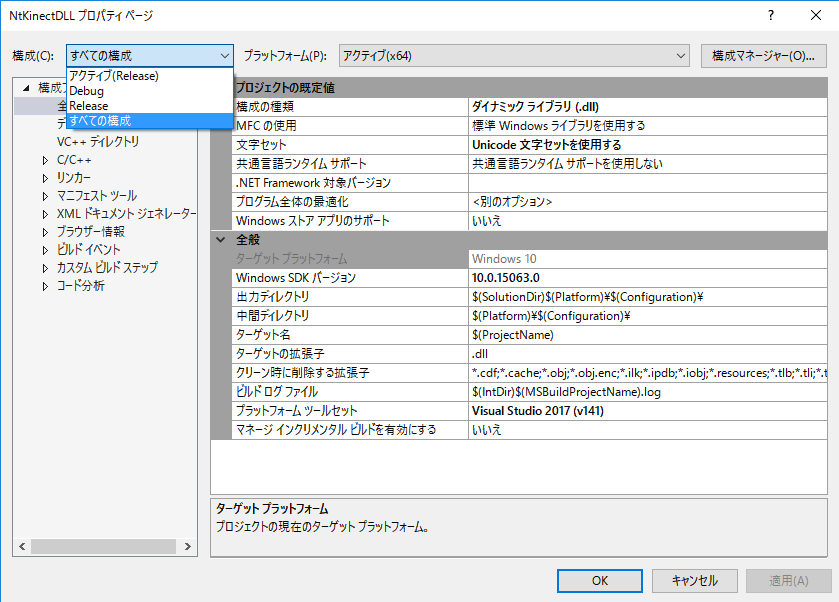
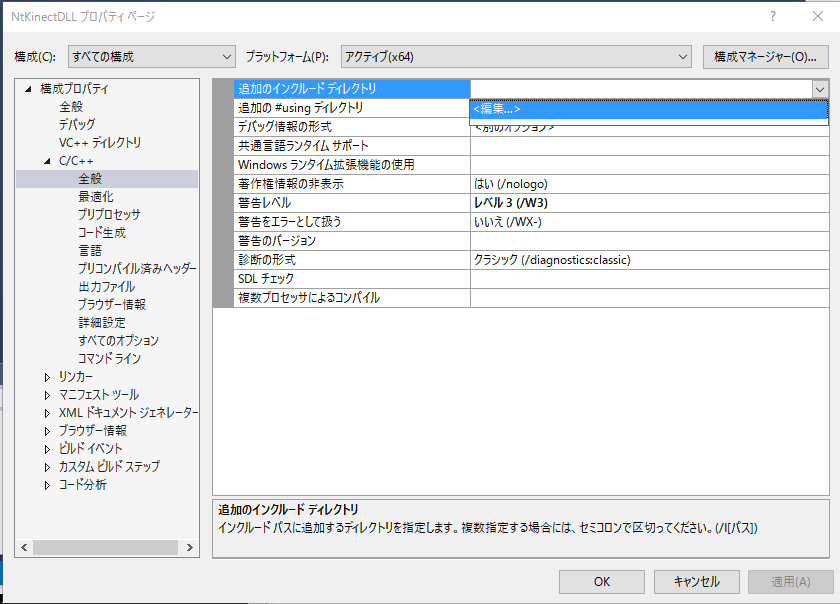
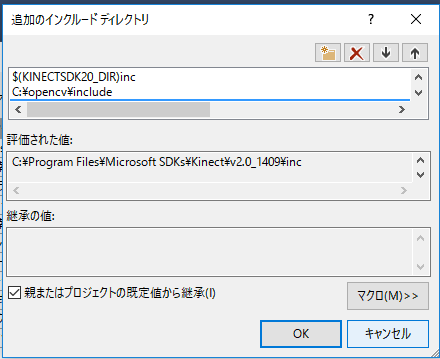
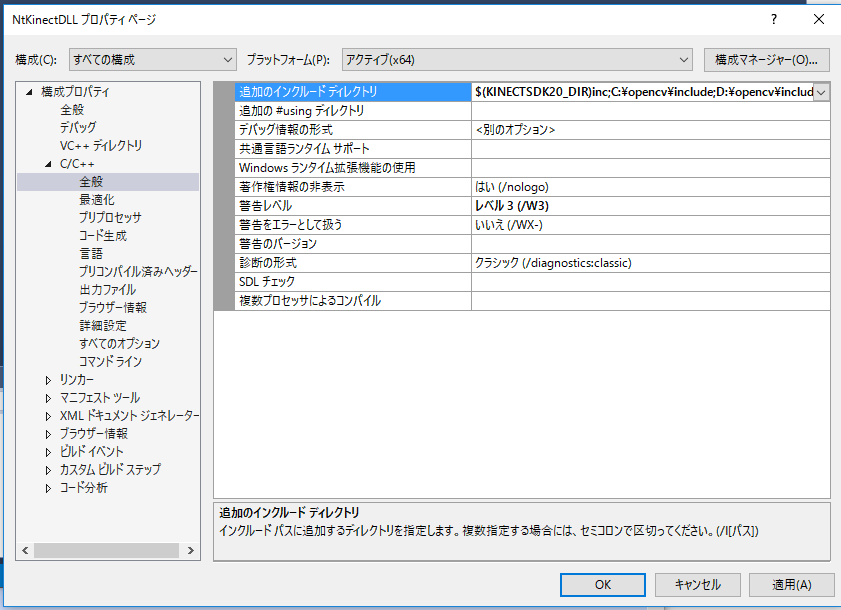
「構成プロパティ」 -> 「C/C++」 -> 全般 -> 追加のインクルードディレクトリ
$(KINECTSDK20_DIR)inc C:\opencv\include D:\opencv\include
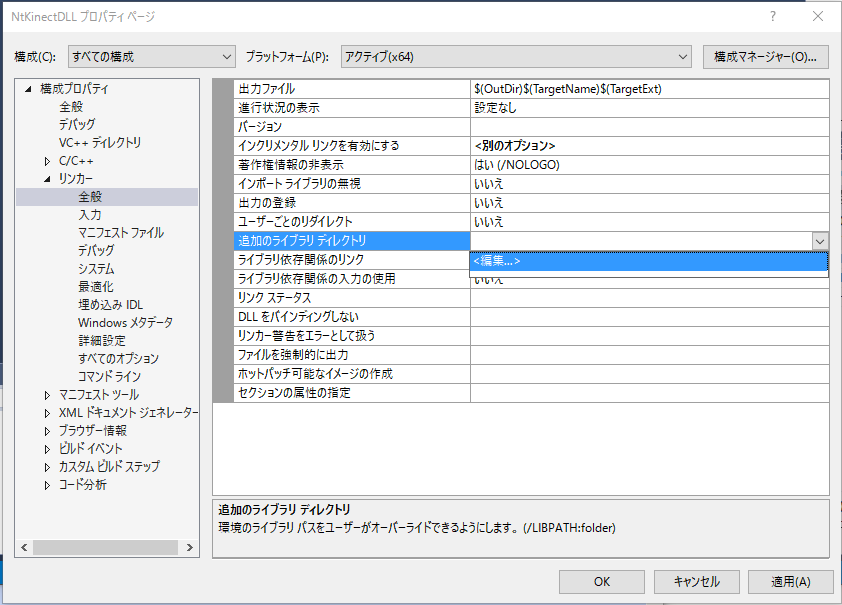
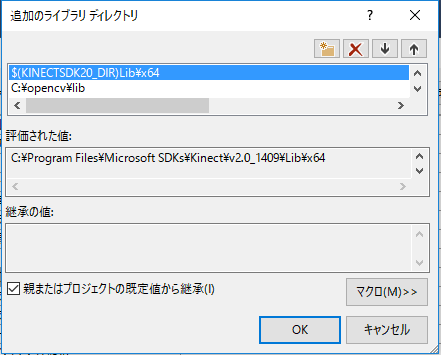
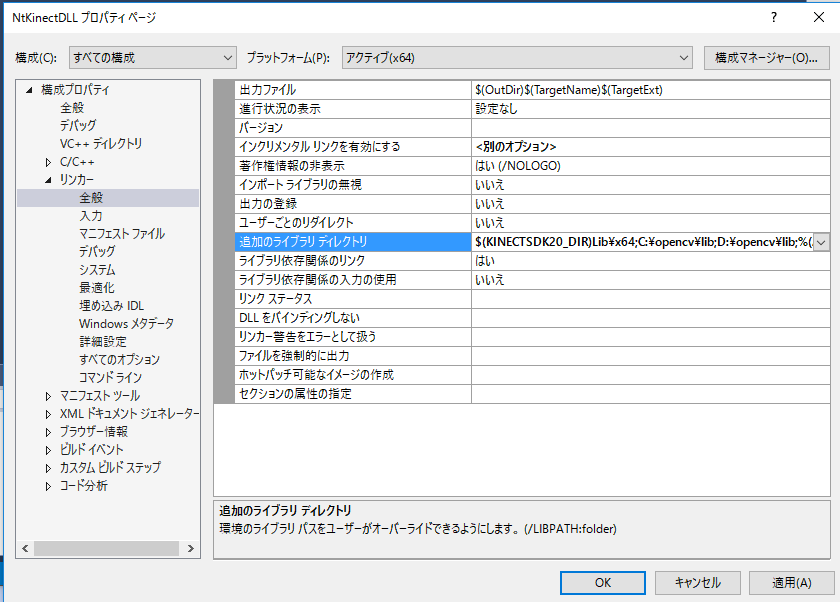
「構成プロパティ」 -> 「リンカー」 -> 全般 -> 追加のライブラリディレクトリ
$(KINECTSDK20_DIR)Lib\x64 C:\opencv\lib D:\opencv\lib
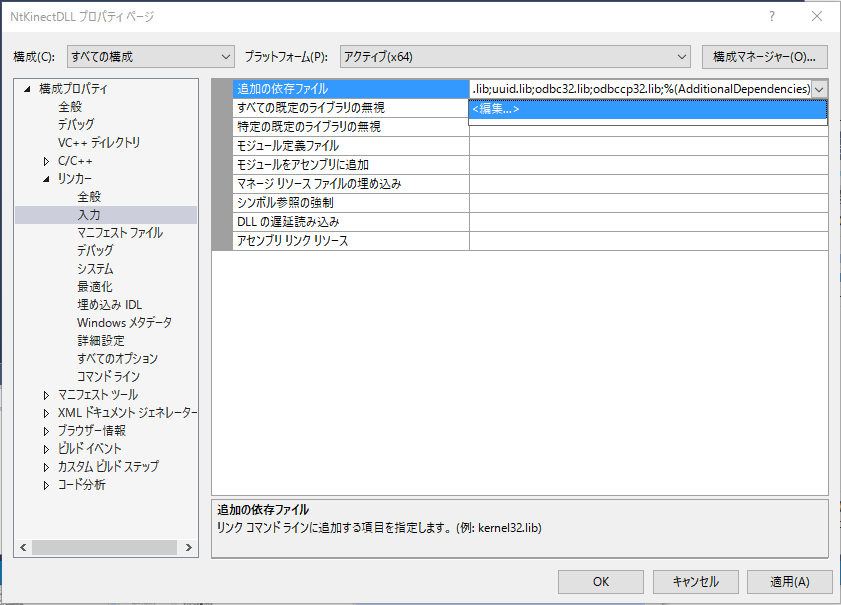
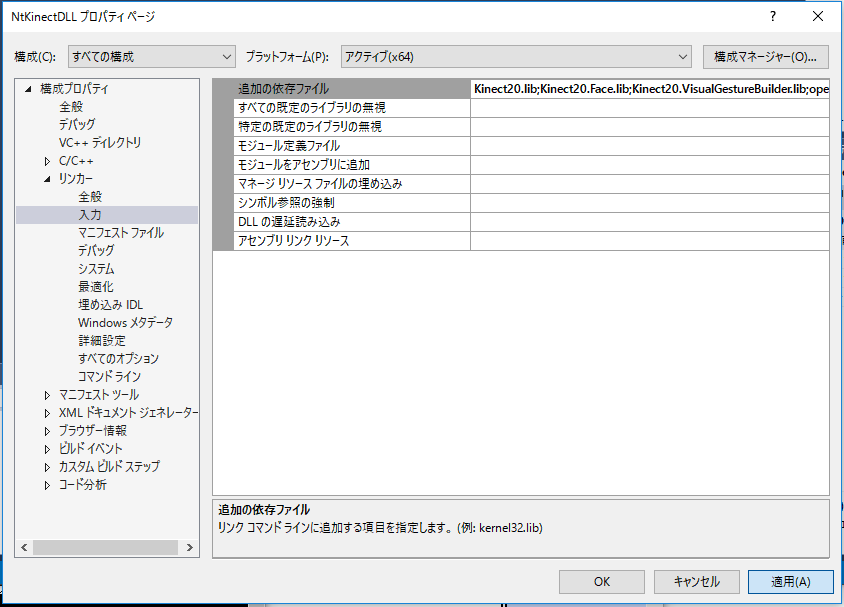
「構成プロパティ」 -> 「リンカー」 -> 全般 -> 入力
Kinect20.lib Kinect20.Face.lib Kinect20.VisualGestureBuilder.lib opencv_world330.lib

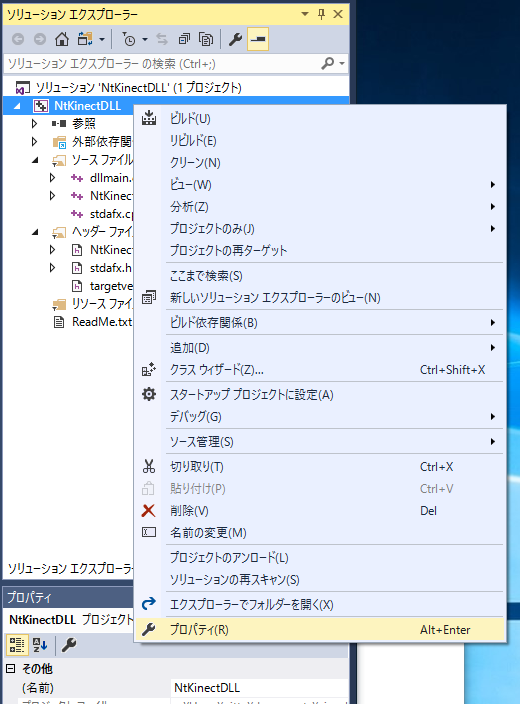
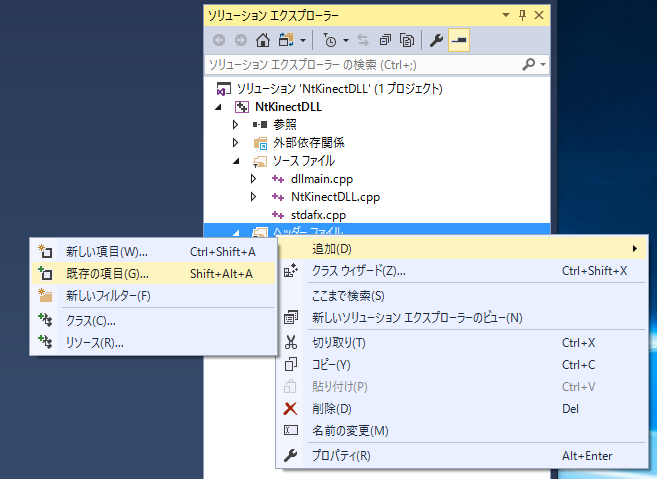
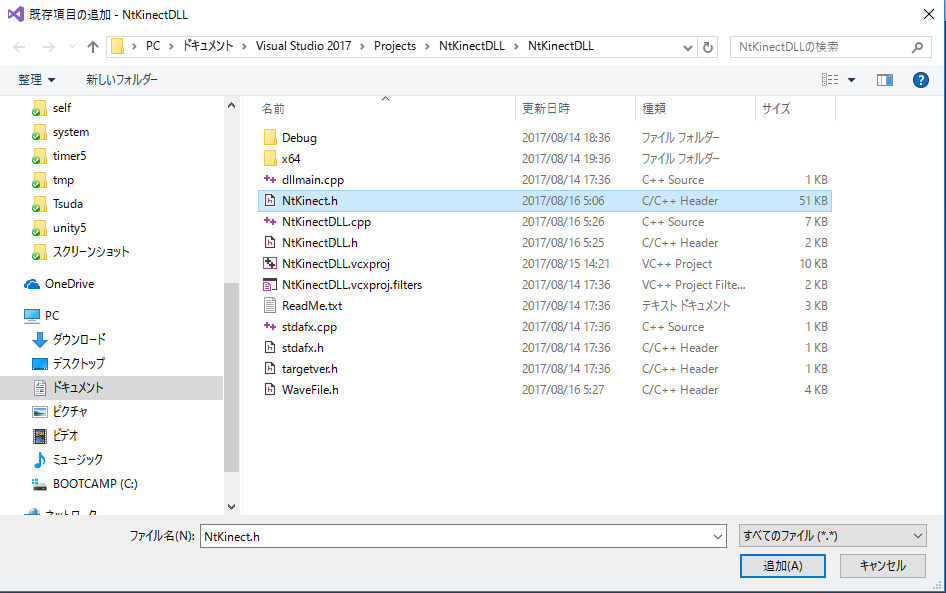
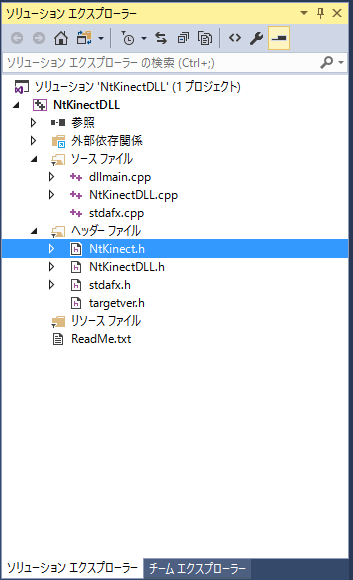
上記のリンクから NtKinect.h をダウンロードして下さい。 dllmain.cpp などプロジェクトのソースが置かれているフォルダ(この例だと NtKinectDLL/NtKinectDLL)に NtKinect.h を配置してから、 「ソリューションエクスプローラ」の「ヘッダーファイル」の上で右クリックで 「追加」 -> 「既存の項目」 -> NtKinect.h を選択します。
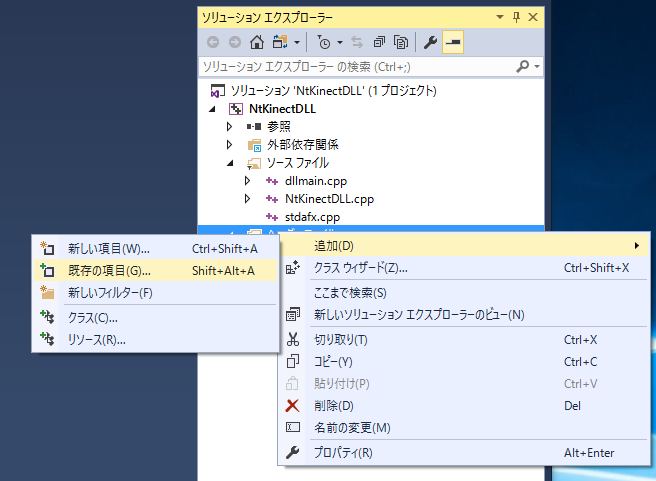
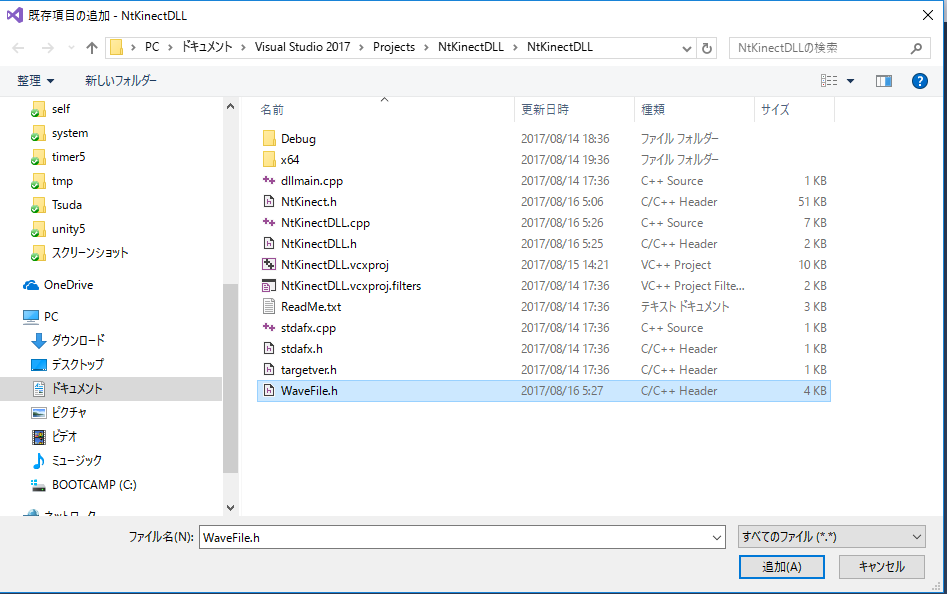
Microsoft が配布している AudioCaptureRaw-Console C++ Sample の WaveFile.h を少し変更したものをプロジェクトに加えます。 上記のリンクから WaveFile.h をダウンロードして下さい。 dllmain.cpp などプロジェクトのソースが置かれているフォルダ(この例だと NtKinectDLL/NtKinectDLL)に WaveFile.h を配置してから、 「ソリューションエクスプローラ」の「ヘッダーファイル」の上で右クリックで 「追加」 -> 「既存の項目」 -> WaveFile.h を選択します。

緑文字の部分がプロジェクトを作成した時から定義されているDLLのimport/exportに関する部分です。 NtKinectDLL.hはこのプロジェクト内ではexport用の宣言となり、他のプロジェクトに読み込まれたときは import用の宣言となります。
| NtKinectDLL.h |
/*
* Copyright (c) 2017 Yoshihisa Nitta
* Released under the MIT license
* http://opensource.org/licenses/mit-license.php
*/
/*
* NtKinectDLL.h version 1.2.6: 2017/11/08
* http://nw.tsuda.ac.jp/lec/kinect2/NtKinectDLL
*
* requires:
* NtKinect version 1.8.2 and later
*/
#ifdef NTKINECTDLL_EXPORTS
#define NTKINECTDLL_API __declspec(dllexport)
#else
#define NTKINECTDLL_API __declspec(dllimport)
#endif
namespace NtKinectDLL {
extern "C" {
NTKINECTDLL_API void* getKinect(void);
NTKINECTDLL_API void stopKinect(void* ptr);
// OpenCV
NTKINECTDLL_API void imshow(void* ptr);
NTKINECTDLL_API void imshowBlack(void* ptr);
// CoordinateMapper
/*
NTKINECTDLL_API void mapCameraPointToColorSpace(void* ptr,void* sv,void* cv);
NTKINECTDLL_API void mapCameraPointToDepthSpace(void* ptr,void* sv,void* dv);
NTKINECTDLL_API void mapDepthPointToColorSpace(void* ptr,void* dv,UINT16 depth,void* cv);
NTKINECTDLL_API void mapDepthPointToCameraSpace(void* ptr,void* dv,UINT16 depth,void* sv);
*/
NTKINECTDLL_API void mapCameraPointToColorSpace(void* ptr, void* sv, void* cv, int n);
NTKINECTDLL_API void mapCameraPointToDepthSpace(void* ptr, void* sv, void* dv, int n);
NTKINECTDLL_API void mapDepthPointToColorSpace(void* ptr, void* dv, void* dth, void* cv, int n);
NTKINECTDLL_API void mapDepthPointToCameraSpace(void* ptr, void* dv, void* dth, void* sv, int n);
// Multi Thread
NTKINECTDLL_API void acquire(void* ptr);
NTKINECTDLL_API void release(void* ptr);
// Audio
NTKINECTDLL_API void setAudio(void* ptr, bool flag);
NTKINECTDLL_API float getBeamAngle(void* ptr);
NTKINECTDLL_API float getBeamAngleConfidence(void* ptr);
NTKINECTDLL_API unsigned __int64 getAudioTrackingId(void* ptr);
NTKINECTDLL_API void openAudio(void* ptr, wchar_t* filename);
NTKINECTDLL_API void closeAudio(void* ptr);
NTKINECTDLL_API bool isOpenedAudio(void* ptr);
// RGB
NTKINECTDLL_API void setRGB(void* ptr);
NTKINECTDLL_API int getRGB(void* ptr, void* data);
// Depth
NTKINECTDLL_API void setDepth(void* ptr);
NTKINECTDLL_API int getDepth(void* ptr, void* data);
// Infrared
NTKINECTDLL_API void setInfrared(void* ptr);
NTKINECTDLL_API int getInfrared(void* ptr, void* data);
// BodyIndex
NTKINECTDLL_API void setBodyIndex(void* ptr);
NTKINECTDLL_API int getBodyIndex(void* ptr, void* data);
// Skeleton
NTKINECTDLL_API void setSkeleton(void* ptr);
NTKINECTDLL_API int getSkeleton(void* ptr, void* skelton, void* state, void* id, void* tid);
NTKINECTDLL_API int handState(void* ptr, int id, bool isLeft);
// Face
NTKINECTDLL_API void setFace(void* ptr, bool flag);
NTKINECTDLL_API int getFace(void* ptr, float* point, float* rect, float* direction, int* property, void* tid);
// HDFace
NTKINECTDLL_API void setHDFace(void* ptr);
NTKINECTDLL_API int getHDFace(void* ptr, float* point, void* tid, int *status);
// Gesture
NTKINECTDLL_API void setGestureFile(void* ptr, wchar_t* filename);
NTKINECTDLL_API int setGestureId(void* ptr, wchar_t* name, int id); // id: non-zero
NTKINECTDLL_API void setGesture(void* ptr);
NTKINECTDLL_API int getDiscreteGesture(void* ptr, int* gid, float* confidence, void* tid);
NTKINECTDLL_API int getContinuousGesture(void* ptr, int* gid, float* progress, void* tid);
NTKINECTDLL_API int getGidMapSize();
// Video
NTKINECTDLL_API void openVideo(void* ptr, wchar_t* filename);
NTKINECTDLL_API void writeVideo(void* ptr);
NTKINECTDLL_API void closeVideo(void* ptr);
}
//Gesture
std::unordered_map<std::string, int> gidMap;
}
|
関数宣言の先頭に "NTKINECTDLL_API" を記述する必要があります。 これは NtKinectDLL.h の中で定義されているマクロで、DLLからのexport/import を容易にするものです。
DLLの中ではオブジェクトはヒープに確保する必要があります。 そのため void* getKinect()関数では NtKinectを new してそのポインタを(void *)にキャストして返しています。
DLLの関数を実行するときは、ヒープ上のNtKinectオブジェクトのポインタを渡してもらい、 (void *)型のポインタから (NtKinect *)型のポインタに変更してNtKinect の機能を利用します。 下の例では関数中では kinect 変数は (NtKinect *)型のポインタになるので、 たとえば rgbImage というメンバ変数へのアクセスは (*kinect).rgbImage と記述します。
rgb画像を表示する imshow() 関数では、 カメラで取得した画像を1/16に縮小してその上に関節を赤で描画しcv::imshow()で表示しています。 ウィンドウの内容を正しく表示させるためにはcv::waitKey(1)を呼び出す必要があります。
| NtKinectDLL.cpp |
/*
* Copyright (c) 2017 Yoshihisa Nitta
* Released under the MIT license
* http://opensource.org/licenses/mit-license.php
*/
/*
* NtKinectDLL.h version 1.2.6: 2017/11/08
* http://nw.tsuda.ac.jp/lec/kinect2/NtKinectDLL
*
* requires:
* NtKinect version 1.8.2 and after
*/
#include "stdafx.h"
#include <unordered_map>
#ifndef NTKINECTDLL_EXPORTS
#define NTKINECTDLL_EXPORTS // cheap trick to avoid DLL Compiling Bug of "Visual Studio 2017 Update 2"
#endif
#include "NtKinectDLL.h"
#define USE_AUDIO
#define USE_FACE
#define USE_GESTURE
#define USE_THREAD
#include "NtKinect.h"
using namespace std;
namespace NtKinectDLL {
string wchar2string(wchar_t* name) {
int len = WideCharToMultiByte(CP_UTF8, NULL, name, -1, NULL, 0, NULL, NULL) + 1;
char* nameBuffer = new char[len];
memset(nameBuffer, '\0', len);
WideCharToMultiByte(CP_UTF8, NULL, name, -1, nameBuffer, len, NULL, NULL);
string s(nameBuffer);
return s;
}
NTKINECTDLL_API void* getKinect(void) {
NtKinect* kinect = new NtKinect();
return static_cast<void*>(kinect);
}
NTKINECTDLL_API void stopKinect(void* ptr) {
cv::destroyAllWindows();
NtKinect* kinect = static_cast<NtKinect*>(ptr);
delete kinect;
}
// OpenCV
NTKINECTDLL_API void imshow(void* ptr) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
int scale = 4;
cv::Mat img((*kinect).rgbImage);
cv::resize(img, img, cv::Size(img.cols / scale, img.rows / scale), 0, 0);
for (auto& person : (*kinect).skeleton) {
for (auto& joint : person) {
if (joint.TrackingState == TrackingState_NotTracked) continue;
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapCameraPointToColorSpace(joint.Position, &cp);
cv::rectangle(img, cv::Rect((int)cp.X / scale - 2, (int)cp.Y / scale - 2, 4, 4), cv::Scalar(0, 0, 255), 2);
}
}
for (auto r : (*kinect).faceRect) {
cv::Rect r2(r.x / scale, r.y / scale, r.width / scale, r.height / scale);
cv::rectangle(img, r2, cv::Scalar(255, 255, 0), 2);
}
cv::imshow("face", img);
cv::waitKey(1);
}
vector<cv::Rect> savedRect;
NTKINECTDLL_API void imshowBlack(void* ptr) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
int scale = 4;
cv::Mat img((*kinect).rgbImage);
cv::resize(img, img, cv::Size(img.cols / scale, img.rows / scale), 0, 0);
if ((*kinect).faceRect.size() == 0) {
for (auto& r : savedRect) {
(*kinect).faceRect.push_back(r);
}
}
else {
savedRect.clear();
for (auto& r : (*kinect).faceRect) {
savedRect.push_back(r);
}
}
for (auto r : (*kinect).faceRect) {
cv::Rect r2(r.x / scale, r.y / scale, r.width / scale, r.height / scale);
cv::rectangle(img, r2, cv::Scalar(0, 0, 0), -1);
}
for (auto& person : (*kinect).skeleton) {
for (auto& joint : person) {
if (joint.TrackingState == TrackingState_NotTracked) continue;
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapCameraPointToColorSpace(joint.Position, &cp);
cv::rectangle(img, cv::Rect((int)cp.X / scale - 2, (int)cp.Y / scale - 2, 4, 4), cv::Scalar(0, 0, 255), 2);
}
}
for (auto r : (*kinect).faceRect) {
cv::Rect r2(r.x / scale, r.y / scale, r.width / scale, r.height / scale);
cv::rectangle(img, r2, cv::Scalar(255, 255, 0), 2);
}
cv::imshow("face", img);
cv::waitKey(1);
}
// CoordinateMapper
/*
NTKINECTDLL_API void mapCameraPointToColorSpace(void* ptr,void* sv,void* cv) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
CameraSpacePoint sp; sp.X = ((float*)sv)[0]; sp.Y = ((float*)sv)[1]; sp.Z = ((float*)sv)[2];
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapCameraPointToColorSpace(sp,&cp);
((float*)cv)[0] = cp.X; ((float*)cv)[1] = cp.Y;
}
NTKINECTDLL_API void mapCameraPointToDepthSpace(void* ptr,void* sv,void* dv) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
CameraSpacePoint sp; sp.X = ((float*)sv)[0]; sp.Y = ((float*)sv)[1]; sp.Z = ((float*)sv)[2];
DepthSpacePoint dp;
(*kinect).coordinateMapper->MapCameraPointToDepthSpace(sp,&dp);
((float*)dv)[0] = dp.X; ((float*)dv)[1] = dp.Y;
}
NTKINECTDLL_API void mapDepthPointToColorSpace(void* ptr,void* dv,UINT16 depth,void* cv) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
DepthSpacePoint dp; dp.X = ((float*)dv)[0]; dp.Y = ((float*)dv)[1];
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapDepthPointToColorSpace(dp,depth,&cp);
((float*)cv)[0] = cp.X; ((float*)cv)[1] = cp.Y;
}
NTKINECTDLL_API void mapDepthPointToCameraSpace(void* ptr,void* dv,UINT16 depth,void* sv) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
DepthSpacePoint dp; dp.X = ((float*)dv)[0]; dp.Y = ((float*)dv)[1];
CameraSpacePoint sp;
(*kinect).coordinateMapper->MapDepthPointToCameraSpace(dp,depth,&sp);
((float*)sv)[0] = sp.X; ((float*)sv)[1] = sp.Y; ((float*)sv)[2] = sp.Z;
}
*/
NTKINECTDLL_API void mapCameraPointToColorSpace(void* ptr, void* sv, void* cv, int n) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* sa = (float*)sv;
float* ca = (float*)cv;
for (int i = 0; i<n; i++) {
CameraSpacePoint sp; sp.X = *sa++; sp.Y = *sa++; sp.Z = *sa++;
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapCameraPointToColorSpace(sp, &cp);
*ca++ = cp.X; *ca++ = cp.Y;
}
}
NTKINECTDLL_API void mapCameraPointToDepthSpace(void* ptr, void* sv, void* dv, int n) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* sa = (float*)sv;
float* da = (float*)dv;
for (int i = 0; i<n; i++) {
CameraSpacePoint sp; sp.X = *sa++; sp.Y = *sa++; sp.Z = *sa++;
DepthSpacePoint dp;
(*kinect).coordinateMapper->MapCameraPointToDepthSpace(sp, &dp);
*da++ = dp.X; *da++ = dp.Y;
}
}
NTKINECTDLL_API void mapDepthPointToColorSpace(void* ptr, void* dv, void* dth, void* cv, int n) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* da = (float*)dv;
UINT16* dth_addr = (UINT16*)dth;
float* ca = (float*)cv;
for (int i = 0; i<n; i++) {
DepthSpacePoint dp; dp.X = *da++; dp.Y = *da++;
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapDepthPointToColorSpace(dp, *dth_addr++, &cp);
*ca++ = cp.X; *ca++ = cp.Y;
}
}
NTKINECTDLL_API void mapDepthPointToCameraSpace(void* ptr, void* dv, void* dth, void* sv, int n) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* da = (float*)dv;
UINT16* dth_addr = (UINT16*)dth;
float* sa = (float*)sv;
for (int i = 0; i<n; i++) {
DepthSpacePoint dp; dp.X = *da++; dp.Y = *da++;
CameraSpacePoint sp;
(*kinect).coordinateMapper->MapDepthPointToCameraSpace(dp, *dth_addr++, &sp);
*sa++ = sp.X; *sa++ = sp.Y; *sa++ = sp.Z;
}
}
// Multi Thread
NTKINECTDLL_API void acquire(void* ptr) { (*static_cast<NtKinect*>(ptr)).acquire(); }
NTKINECTDLL_API void release(void* ptr) { (*static_cast<NtKinect*>(ptr)).release(); }
// Audio
NTKINECTDLL_API void setAudio(void* ptr, bool flag) { (*static_cast<NtKinect*>(ptr)).setAudio(flag); }
NTKINECTDLL_API float getBeamAngle(void* ptr) { return (*static_cast<NtKinect*>(ptr)).beamAngle; }
NTKINECTDLL_API float getBeamAngleConfidence(void* ptr) { return (*static_cast<NtKinect*>(ptr)).beamAngleConfidence; }
NTKINECTDLL_API unsigned __int64 getAudioTrackingId(void* ptr) { return (*static_cast<NtKinect*>(ptr)).audioTrackingId; }
NTKINECTDLL_API void openAudio(void* ptr, wchar_t* filename) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
(*kinect).openAudio(wchar2string(filename));
}
NTKINECTDLL_API void closeAudio(void* ptr) { (*static_cast<NtKinect*>(ptr)).closeAudio(); }
NTKINECTDLL_API bool isOpenedAudio(void* ptr) { return (*static_cast<NtKinect*>(ptr)).isOpenedAudio(); }
// RGB
NTKINECTDLL_API void setRGB(void* ptr) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
(*kinect).setRGB();
}
NTKINECTDLL_API int getRGB(void* ptr, void* data) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
char* idx = (char*)data;
for (int y = 0; y<(*kinect).rgbImage.rows; y++) {
for (int x = 0; x<(*kinect).rgbImage.cols; x++) {
cv::Vec4b& pxl = (*kinect).rgbImage.at<cv::Vec4b>(y, x);
*idx++ = pxl[2]; // Red
*idx++ = pxl[1]; // Green
*idx++ = pxl[0]; // Blue
*idx++ = pxl[3]; // Alpha
}
}
return (int)(idx - (char*)data);
}
// Depth
NTKINECTDLL_API void setDepth(void* ptr) { (*static_cast<NtKinect*>(ptr)).setDepth(); }
NTKINECTDLL_API int getDepth(void* ptr, void* data) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
UINT16* idx = (UINT16*)data;
for (int y = 0; y<(*kinect).depthImage.rows; y++) {
for (int x = 0; x<(*kinect).depthImage.cols; x++) {
*idx++ = (*kinect).depthImage.at<UINT16>(y, x);
}
}
return (int)(idx - (UINT16*)data);
}
// Infrared
NTKINECTDLL_API void setInfrared(void* ptr) { (*static_cast<NtKinect*>(ptr)).setInfrared(); }
NTKINECTDLL_API int getInfrared(void* ptr, void* data) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
UINT16* idx = (UINT16*)data;
for (int y = 0; y<(*kinect).infraredImage.rows; y++) {
for (int x = 0; x<(*kinect).infraredImage.cols; x++) {
*idx++ = (*kinect).infraredImage.at<UINT16>(y, x);
}
}
return (int)(idx - (UINT16*)data);
}
// bodyIndex
NTKINECTDLL_API void setBodyIndex(void* ptr) { (*static_cast<NtKinect*>(ptr)).setBodyIndex(); }
NTKINECTDLL_API int getBodyIndex(void* ptr, void* data) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
char* idx = (char*)data;
for (int y = 0; y<(*kinect).bodyIndexImage.rows; y++) {
for (int x = 0; x<(*kinect).bodyIndexImage.cols; x++) {
*idx++ = (*kinect).bodyIndexImage.at<char>(y, x);
}
}
return (int)(idx - (char*)data);
}
// Skeleton
NTKINECTDLL_API void setSkeleton(void* ptr) { (*static_cast<NtKinect*>(ptr)).setSkeleton(); }
NTKINECTDLL_API int getSkeleton(void* ptr, void* skel, void* skelState, void* skelId, void* skelTrackingId) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* skeleton = (float*)skel;
int* state = (int*)skelState;
int* id = (int*)skelId;
UINT64* trackingId = (UINT64*)skelTrackingId;
int idx = 0, jt = 0, st = 0;
for (auto& person : (*kinect).skeleton) {
for (auto& joint : person) {
skeleton[jt++] = joint.Position.X;
skeleton[jt++] = joint.Position.Y;
skeleton[jt++] = joint.Position.Z;
state[st++] = joint.TrackingState;
}
id[idx] = (*kinect).skeletonId[idx];
trackingId[idx] = (*kinect).skeletonTrackingId[idx];
idx++;
}
return idx;
}
NTKINECTDLL_API int handState(void* ptr, int id, bool isLeft) { return (*static_cast<NtKinect*>(ptr)).handState(id, isLeft).first; }
// Face
NTKINECTDLL_API void setFace(void* ptr, bool isColorSpace) { (*static_cast<NtKinect*>(ptr)).setFace(isColorSpace); }
NTKINECTDLL_API int getFace(void* ptr, float* point, float* rect, float* direction, int* property, void* tid) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* p = point;
for (auto& face : (*kinect).facePoint) {
for (auto& pt : face) {
*p++ = pt.X;
*p++ = pt.Y;
}
}
int np = (int)(p - point) / 2;
p = rect;
for (auto& r : (*kinect).faceRect) {
*p++ = (float)r.x;
*p++ = (float)r.y;
*p++ = (float)r.width;
*p++ = (float)r.height;
}
int nr = (int)(p - rect) / 4;
p = direction;
for (auto& d : (*kinect).faceDirection) {
*p++ = d[0];
*p++ = d[1];
*p++ = d[2];
}
int nd = (int)(p - direction) / 3;
int* a = (int*)property;
for (auto& face : (*kinect).faceProperty) {
for (auto& prop : face) {
*a++ = prop;
}
}
int npr = (int)(a - property);
UINT64* q = (UINT64*)tid;
for (auto& t : (*kinect).faceTrackingId) {
*q++ = t;
}
int nt = (int)(q - (UINT64*)tid);
return min(nt, min(min(npr, nd), min(nr, np)));
}
// HDFace
NTKINECTDLL_API void setHDFace(void* ptr) { (*static_cast<NtKinect*>(ptr)).setHDFace(); }
NTKINECTDLL_API int getHDFace(void* ptr, float* point, void* tid, int* status) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float *p = (float*)point;
for (auto& person : (*kinect).hdfaceVertices) {
for (auto& cp : person) {
*p++ = cp.X;
*p++ = cp.Y;
*p++ = cp.Z;
}
}
UINT64 *q = (UINT64*)tid;
for (auto& t : (*kinect).hdfaceTrackingId) {
*q++ = t;
}
int* r = (int*)status;
for (auto& s : (*kinect).hdfaceStatus) {
*r++ = s.first;
*r++ = s.second;
}
return (int)(*kinect).hdfaceVertices.size();
}
// Gesture
NTKINECTDLL_API void setGestureFile(void* ptr, wchar_t* filename) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
wstring fname(filename);
(*kinect).setGestureFile(fname);
}
NTKINECTDLL_API int setGestureId(void* ptr, wchar_t* name, int id) {
int len = WideCharToMultiByte(CP_UTF8, NULL, name, -1, NULL, 0, NULL, NULL) + 1;
char* nameBuffer = new char[len];
memset(nameBuffer, '\0', len);
WideCharToMultiByte(CP_UTF8, NULL, name, -1, nameBuffer, len, NULL, NULL);
string s(nameBuffer);
gidMap[s] = id;
return id;
}
NTKINECTDLL_API void setGesture(void* ptr) { (*static_cast<NtKinect*>(ptr)).setGesture(); }
NTKINECTDLL_API int getDiscreteGesture(void* ptr, int* gid, float* confidence, void *tid) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
UINT64* trackingId = (UINT64*)tid;
for (int i = 0; i<(*kinect).discreteGesture.size(); i++) {
auto g = (*kinect).discreteGesture[i];
string gname = (*kinect).gesture2string(g.first);
gid[i] = gidMap[gname];
confidence[i] = g.second;
trackingId[i] = (*kinect).discreteGestureTrackingId[i];
}
return (int)(*kinect).discreteGesture.size();
}
NTKINECTDLL_API int getContinuousGesture(void* ptr, int* gid, float* progress, void *tid) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
UINT64* trackingId = (UINT64*)tid;
for (int i = 0; i<(*kinect).continuousGesture.size(); i++) {
auto g = (*kinect).continuousGesture[i];
string gname = (*kinect).gesture2string(g.first);
gid[i] = gidMap[gname];
progress[i] = g.second;
trackingId[i] = (*kinect).continuousGestureTrackingId[i];
}
return (int)(*kinect).continuousGesture.size();
}
NTKINECTDLL_API int getGidMapSize() {
return (int)gidMap.size();
}
// Video
cv::VideoWriter *videoWriter = nullptr;
cv::Size videoSize;
bool videoOnSave = false;
NTKINECTDLL_API void openVideo(void* ptr, wchar_t* filename) {
NtKinect *kinect = static_cast<NtKinect*>(ptr);
string fname = wchar2string(filename);
if (videoOnSave) {
std::cerr << "cannot open two video files simultaneously" << std::endl;
return;
}
videoSize = cv::Size(1920 / 4, 1080 / 4);
// rename CV_FOURCC_MACRO as cv::VideoWriter::fourcc (in case of opencv3 and later)
videoWriter = new cv::VideoWriter(fname, CV_FOURCC_MACRO('X', 'V', 'I', 'D'), 30.0, videoSize);
if (!(*videoWriter).isOpened()) {
std::cerr << "cannot open video file" << std::endl;
return;
}
videoOnSave = true;
}
NTKINECTDLL_API void writeVideo(void* ptr) {
NtKinect *kinect = static_cast<NtKinect*>(ptr);
cv::Mat img;
if (videoOnSave) {
cv::resize((*kinect).rgbImage, img, videoSize, 0, 0);
// rename CV_BGRA2BGR as cv::COLOR_BGRA2BGR (in case of opencv3 and later)
cv::cvtColor(img, img, CV_BGRA2BGR);
(*videoWriter) << img;
}
}
NTKINECTDLL_API void closeVideo(void* ptr) {
if (videoOnSave) {
(*videoWriter).release();
delete videoWriter;
videoWriter = nullptr;
videoOnSave = false;
}
}
}
|
[注意] ダイナミックリンクライブラリを作りたいので、ここではコンパイル、すなわちビルドするだけです。 このプロジェクトではプログラム本体を作成してはいないので、実行しようとすると (意味のない)エラーが発生します。
[注意2] .lib ファイルと .dll ファイルが生成されるのは プロジェクト直下のフォルダ (プロジェクト名)/x64/Release です。 ソースファイルが置かれているフォルダの下の (プロジェクト名)/NtKinectDLL/x64/Release ではありません。
上記のzipファイルには必ずしも最新の NtKinect.h が含まれていない場合があるので、 こちらから最新版をダウンロードして 差し替えてお使い下さい。