次のソフトウェアがインストールされていることを前提条件とします。インストールのパスが異なる場合は適宜読み替えて下さい。
|
Visual Studio 2017 Professional/Community を使う場合は、 「C++ によるデスクトップ開発」の「Windows 8.1 SDK と UCRT SDK」オプションが必要 |
| 実行ファイルのパス | C:\opencv\bin | <-- 環境変数のPathに追加しておくこと |
| インクルードファイルのパス | C:\opencv\include | |
| ライブラリのパス | C:\opencv\lib |
| インクルードファイルのパス | $(KINECTSDK20_DIR)inc | |
| ライブラリのパス | $(KINECTSDK20_DIR)Lib\x64 |
NtKinectDLL 経由で Kinect V2 を利用する Unity のプロジェクトを作成します。
Unity(C#) のデータは managed (ガベージコレクタによって管理されており場所を移動することがある) な状態であり、DLL(C++) のデータは unmanaged (場所が移動することはない) な状態です。 この間でデータを受け渡すには、状態を変換する必要があり、 それにはC# の System.Runtime.InteropServices.Marshal クラス のメソッドを利用します。
C#と他の言語の間でデータを受け渡しを行うには、 Blittable type な変数を用います。
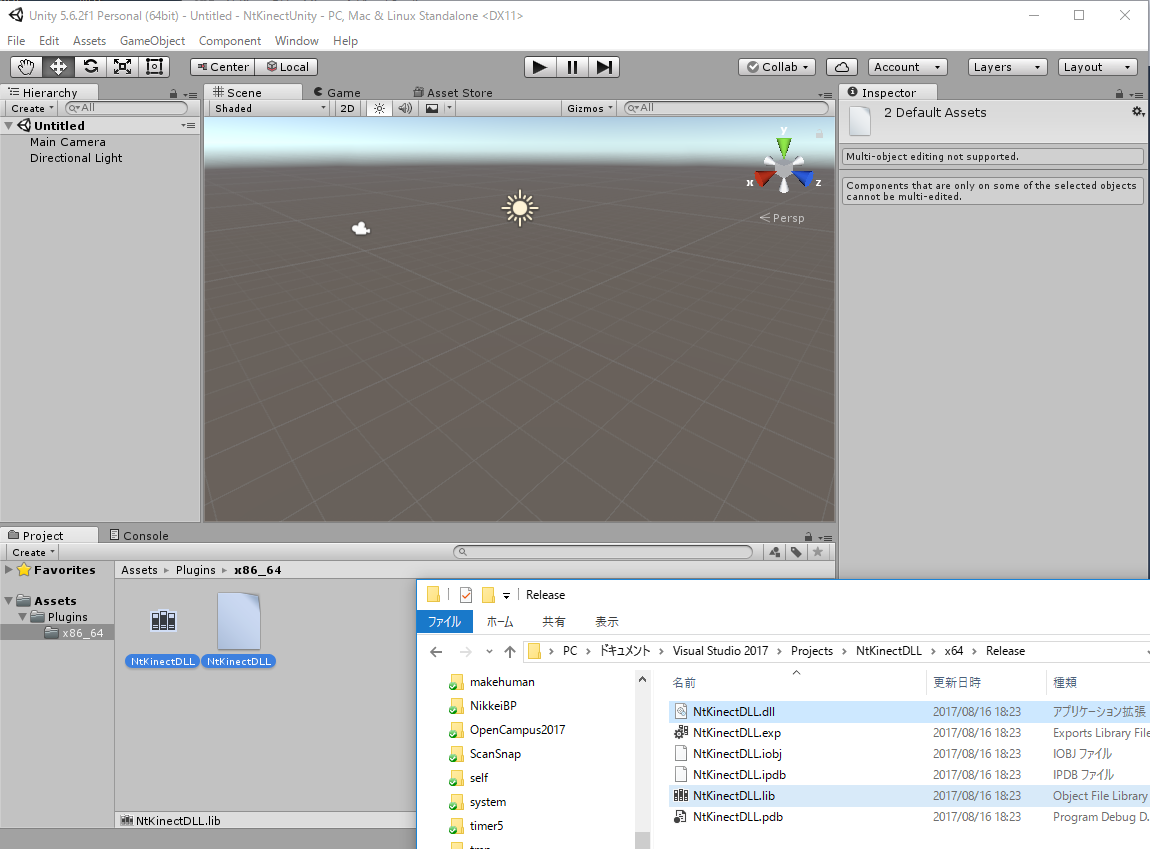
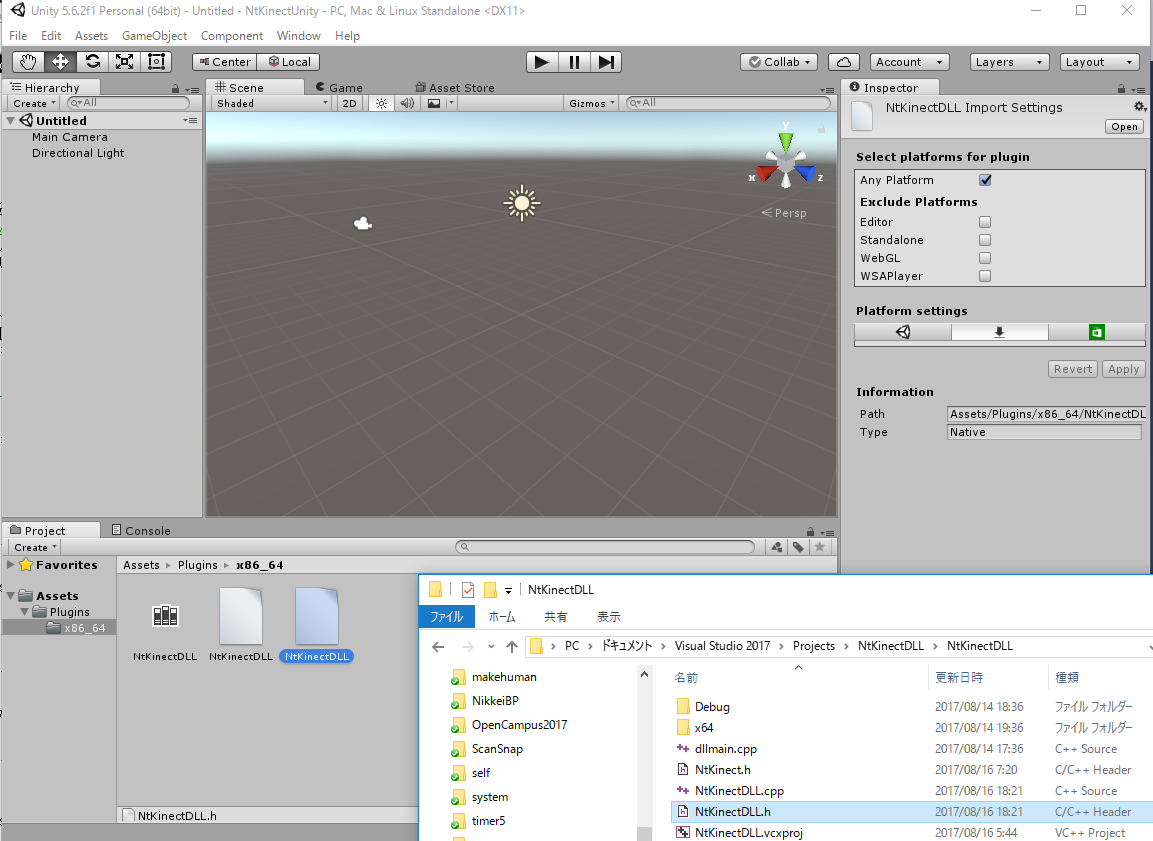
NtKinectDLL/x64/Release/の下から NtKinectDLL.dll, NtKinectDLL.lib を、
NtKinectDLL/NtKinectDLL/ の下から NtKinectDLL.h をコピーします。
(2017/09/08 変更)
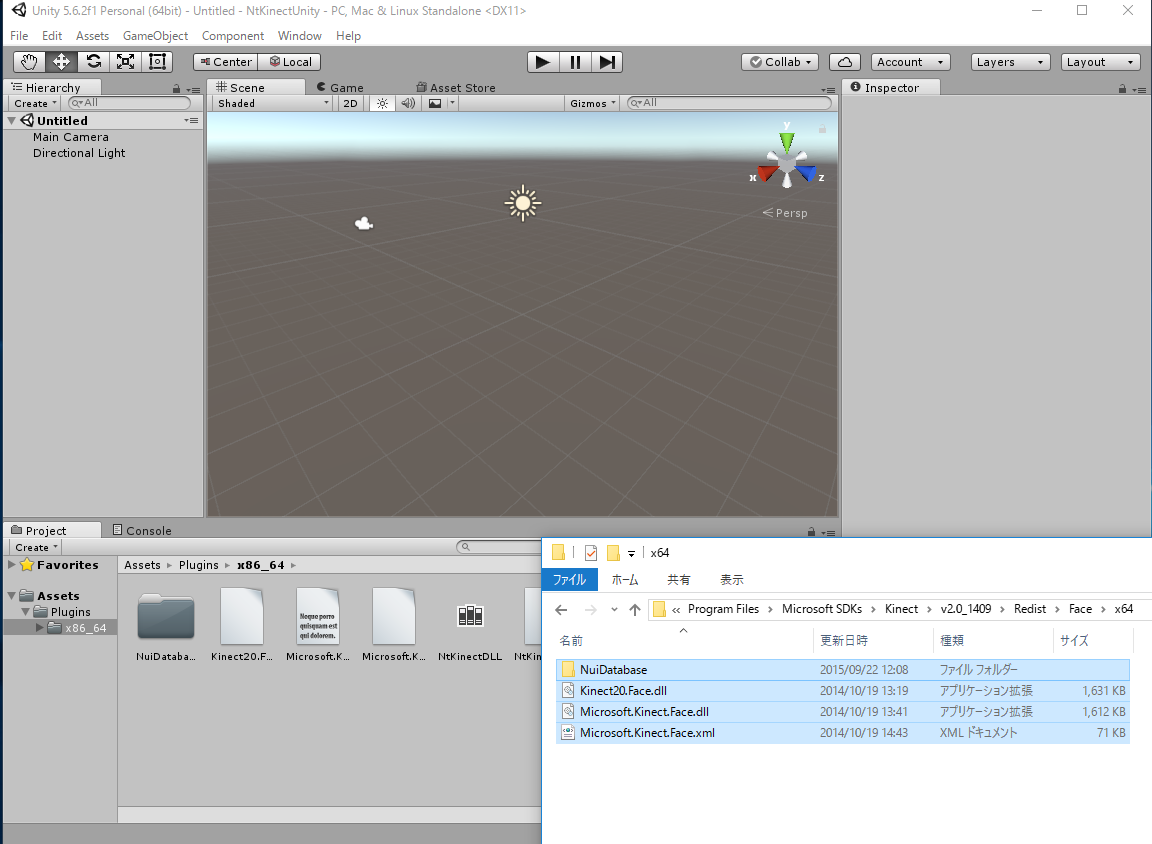
「$(KINECTSDK20_DIR)Redist\Face\x64\の下の全てのファイル」をコピーします。
[注意]$(KINECTSDK20_DIR)は手元の環境では "C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\" に設定されています。 各自の環境にしたがって読み替えて下さい。
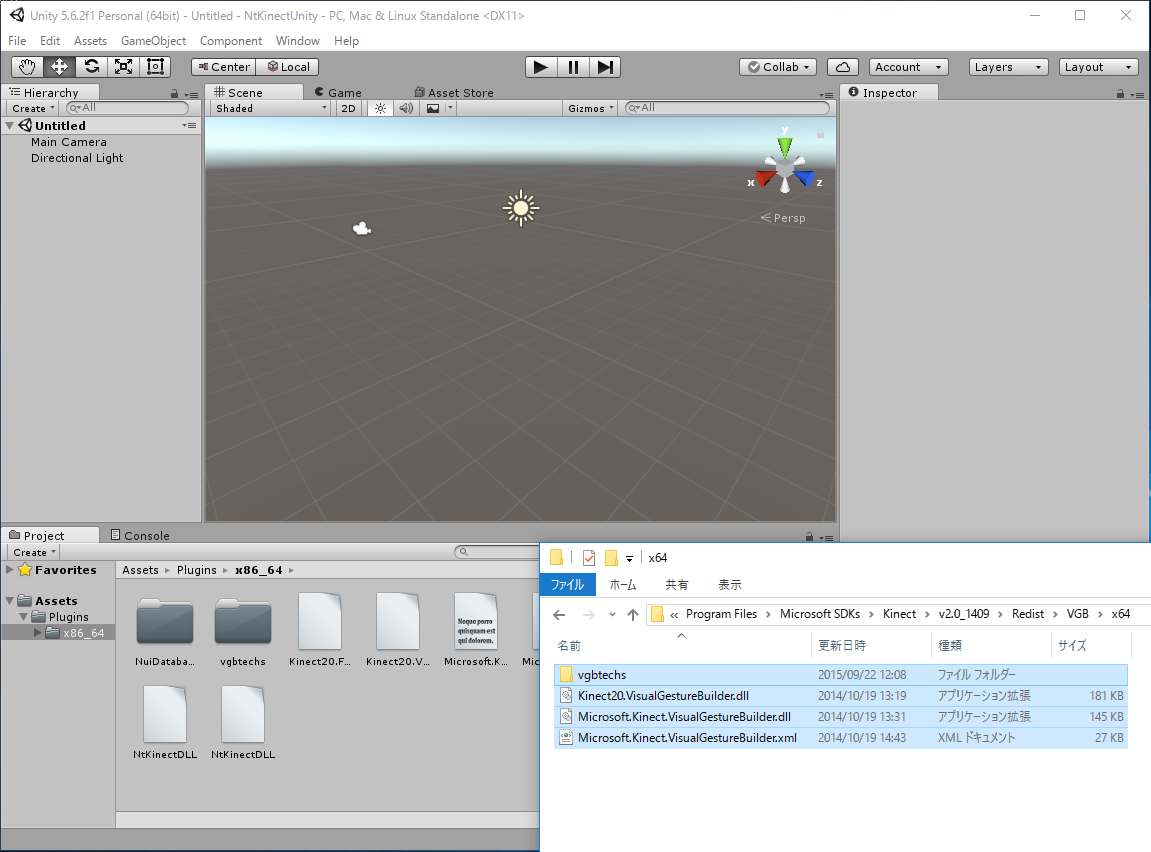
「$(KINECTSDK20_DIR)Redist\VGB\x64\の下の全てのファイル」をコピーします。
[注意]$(KINECTSDK20_DIR)は手元の環境では "C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\" に設定されています。 各自の環境にしたがって読み替えて下さい。
上部のメニューから「Assets」-> 「Create」 -> 「C# Script」 -> ファイル名は NtUnity
| NtUnity.cs |
/*
* Copyright (c) 2017 Yoshihisa Nitta
* Released under the MIT license
* http://opensource.org/licenses/mit-license.php
*/
/*
* NtUnity.cs version 1.2 2017/10/05
* http://nw.tsuda.ac.jp/lec/NtKinectDLL/
*
* requires:
* NtKinectDLL version 1.2.4 or later
*/
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using System;
using System.Runtime.InteropServices;
namespace NtUnity {
public class Kinect {
public const int
// Number
bodyCount = 6,
jointCount = 25,
rgbCols = 1920,
rgbRows = 1080,
depthCols = 512,
depthRows = 424,
// JointType
JointType_SpineBase= 0,
JointType_SpineMid= 1,
JointType_Neck= 2,
JointType_Head= 3,
JointType_ShoulderLeft= 4,
JointType_ElbowLeft= 5,
JointType_WristLeft= 6,
JointType_HandLeft= 7,
JointType_ShoulderRight= 8,
JointType_ElbowRight= 9,
JointType_WristRight= 10,
JointType_HandRight= 11,
JointType_HipLeft= 12,
JointType_KneeLeft= 13,
JointType_AnkleLeft= 14,
JointType_FootLeft= 15,
JointType_HipRight= 16,
JointType_KneeRight= 17,
JointType_AnkleRight= 18,
JointType_FootRight= 19,
JointType_SpineShoulder= 20,
JointType_HandTipLeft= 21,
JointType_ThumbLeft= 22,
JointType_HandTipRight= 23,
JointType_ThumbRight= 24,
// TrackingState
TrackingState_NotTracked= 0,
TrackingState_Inferred= 1,
TrackingState_Tracked= 2,
// FacePoint
FacePointType_None= -1,
FacePointType_EyeLeft= 0,
FacePointType_EyeRight= 1,
FacePointType_Nose= 2,
FacePointType_MouthCornerLeft= 3,
FacePointType_MouthCornerRight= 4,
FacePointType_Count= ( FacePointType_MouthCornerRight + 1 ) ,
// a_FaceProperty
FaceProperty_Happy= 0,
FaceProperty_Engaged= 1,
FaceProperty_WearingGlasses= 2,
FaceProperty_LeftEyeClosed= 3,
FaceProperty_RightEyeClosed= 4,
FaceProperty_MouthOpen= 5,
FaceProperty_MouthMoved= 6,
FaceProperty_LookingAway= 7,
FaceProperty_Count= ( FaceProperty_LookingAway + 1 ) ,
// FaceDetectionResult
DetectionResult_Unknown= 0,
DetectionResult_No= 1,
DetectionResult_Maybe= 2,
DetectionResult_Yes= 3,
// HDFace
HDFaceVerticesSize = 1347,
// dummy
NtKinectdummy = 0;
[DllImport ("NtKinectDLL")] private static extern IntPtr getKinect();
[DllImport ("NtKinectDLL")] private static extern void stopKinect(IntPtr ptr);
// OpenCV
[DllImport ("NtKinectDLL")] private static extern void imshow(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern void imshowBlack(IntPtr ptr);
// CoordinateMapper
[DllImport ("NtKinectDLL")] private static extern void mapCameraPointToColorSpace(IntPtr ptr,IntPtr sv,IntPtr cv,int n);
[DllImport ("NtKinectDLL")] private static extern void mapCameraPointToDepthSpace(IntPtr ptr,IntPtr sv,IntPtr dv,int n);
[DllImport ("NtKinectDLL")] private static extern void mapDepthPointToColorSpace(IntPtr ptr,IntPtr dv,IntPtr dth,IntPtr cv,int n);
[DllImport ("NtKinectDLL")] private static extern void mapDepthPointToCameraSpace(IntPtr ptr,IntPtr dv,IntPtr dth,IntPtr sv,int n);
// Multi Thread
[DllImport ("NtKinectDLL")] private static extern void acquire(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern void release(IntPtr ptr);
// Audio
[DllImport ("NtKinectDLL")] private static extern void setAudio(IntPtr ptr, bool flag);
[DllImport ("NtKinectDLL")] private static extern float getBeamAngle(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern float getBeamAngleConfidence(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern ulong getAudioTrackingId(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern void openAudio(IntPtr ptr, IntPtr filename);
[DllImport ("NtKinectDLL")] private static extern void closeAudio(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern bool isOpenedAudio(IntPtr ptr);
// RGB
[DllImport ("NtKinectDLL")] private static extern void setRGB(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern int getRGB(IntPtr ptr, IntPtr data);
// Depth
[DllImport ("NtKinectDLL")] private static extern void setDepth(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern int getDepth(IntPtr ptr, IntPtr data);
// Infrared
[DllImport ("NtKinectDLL")] private static extern void setInfrared(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern int getInfrared(IntPtr ptr, IntPtr data);
// BodyIndex
[DllImport ("NtKinectDLL")] private static extern void setBodyIndex(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern int getBodyIndex(IntPtr ptr, IntPtr data);
// Skeleton
[DllImport ("NtKinectDLL")] private static extern void setSkeleton(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern int getSkeleton(IntPtr ptr, IntPtr skelton, IntPtr state, IntPtr id, IntPtr tid);
[DllImport ("NtKinectDLL")] private static extern int handState(IntPtr ptr,int id,bool isLeft);
// Face
[DllImport ("NtKinectDLL")] private static extern void setFace(IntPtr ptr, bool isColorSpace);
[DllImport ("NtKinectDLL")] private static extern int getFace(IntPtr ptr, IntPtr point,IntPtr rect,IntPtr direction,IntPtr property,IntPtr tid);
// HDFace
[DllImport ("NtKinectDLL")] private static extern void setHDFace(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern int getHDFace(IntPtr ptr, IntPtr point, IntPtr tid, IntPtr status);
// Gesture
[DllImport ("NtKinectDLL")] private static extern void setGestureFile(IntPtr ptr, IntPtr filename);
[DllImport ("NtKinectDLL")] private static extern int setGestureId(IntPtr ptr, IntPtr name, int id); // id: non-zero
[DllImport ("NtKinectDLL")] private static extern void setGesture(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern int getDiscreteGesture(IntPtr ptr, IntPtr gid, IntPtr confidence, IntPtr tid);
[DllImport ("NtKinectDLL")] private static extern int getContinuousGesture(IntPtr ptr, IntPtr gid, IntPtr progress, IntPtr tid);
[DllImport ("NtKinectDLL")] private static extern int getGidMapSize();
// Video
[DllImport ("NtKinectDLL")] private static extern void openVideo(IntPtr ptr, IntPtr filename);
[DllImport ("NtKinectDLL")] private static extern void writeVideo(IntPtr ptr);
[DllImport ("NtKinectDLL")] private static extern void closeVideo(IntPtr ptr);
private IntPtr kinect;
//public Vector3[] joint = new Vector3[jointCount];
//public int[] jointState = new int[jointCount];
// audio
public float beamAngle;
public float beamAngleConfidence;
public ulong audioTrackingId;
// images
public Color32[] rgbImage;
public ushort[] depthImage;
public ushort[] infraredImage;
public byte[] bodyIndexImage;
// skeleton
public List<List<Vector3>> skeleton;
public List<List<int>> skeletonState;
public List<int> skeletonId;
public List<ulong> skeletonTrackingId;
// skeleton (internal)
private float[] skel;
private int[] skelState;
private int[] skelId;
private ulong[] skelTrackingId;
// face
public List<List<Vector2>> facePoint;
public List<Vector4> faceRect;
public List<Vector3> faceDirection;
public List<List<int>> faceProperty;
public List<ulong> faceTrackingId;
// face (internal)
private float[] fcPoint;
private float[] fcRect;
private float[] fcDirection;
private int[] fcProperty;
private ulong[] fcTrackingId;
// hdface
public List<List<Vector3>> hdfacePoint;
public List<ulong> hdfaceTrackingId;
public List<int> hdfaceStatus;
// hdface (internal)
private float[] hdfcPoint;
private ulong[] hdfcTrackingId;
private int[] hdfcStatus;
// gesture
public List<int> discreteGesture;
public List<float> gestureConfidence;
public List<ulong> discreteGestureTrackingId;
public List<int> continuousGesture;
public List<float> gestureProgress;
public List<ulong> continuousGestureTrackingId;
// gesture (internal)
private int[] gstId;
private float[] gstFloat;
private ulong[] gstTrackingId;
public Kinect() {
kinect = getKinect();
//rgbImage = new byte[rgbRows * rgbCols * 4];
rgbImage = new Color32[rgbRows * rgbCols];
depthImage = new ushort[depthRows * depthCols];
infraredImage = new ushort[depthRows * depthCols];
bodyIndexImage = new byte[depthRows * depthCols];
skeleton = new List<List<Vector3>>();
skeletonState = new List<List<int>>();
skeletonId = new List<int>();
skeletonTrackingId = new List<ulong>();
skel = new float[bodyCount * jointCount * 3];
skelState = new int[bodyCount * jointCount];
skelId = new int[bodyCount];
skelTrackingId = new ulong[bodyCount];
facePoint = new List<List<Vector2>>();
faceRect = new List<Vector4>();
faceDirection = new List<Vector3>();
faceProperty = new List<List<int>>();
faceTrackingId = new List<ulong>();
fcPoint = new float[bodyCount * FacePointType_Count * 3];
fcRect = new float[bodyCount * 4];
fcDirection = new float[bodyCount * 3];
fcProperty = new int[bodyCount * FaceProperty_Count];
fcTrackingId = new ulong[bodyCount];
hdfacePoint = new List<List<Vector3>>();
hdfaceTrackingId = new List<ulong>();
hdfaceStatus = new List<int>();
hdfcPoint = new float[bodyCount * HDFaceVerticesSize * 3];
hdfcTrackingId = new ulong[bodyCount];
hdfcStatus = new int[bodyCount * 2];
discreteGesture = new List<int>();
gestureConfidence = new List<float>();
discreteGestureTrackingId = new List<ulong>();
continuousGesture = new List<int>();
gestureProgress = new List<float>();
continuousGestureTrackingId = new List<ulong>();
gstId = new int[bodyCount * 100];
gstFloat = new float[bodyCount * 100];
gstTrackingId = new ulong[bodyCount * 100];
}
public void stopKinect() { stopKinect(kinect); }
// OpenCV
public void imshow() { imshow(kinect); }
public void imshowBlack() { imshowBlack(kinect); }
// coordinateMapper
public void mapCameraPointToColorSpace(List<Vector3> skel,ref List<Vector2> color,int n) {
float[] sv = new float[n * 3];
float[] cv = new float[n * 2];
for (int i=0; i<n; i++) {
sv[3*i] = skel[i].x; sv[3*i+1] = skel[i].y; sv[3*i+2] = skel[i].z;
}
GCHandle gch = GCHandle.Alloc(sv,GCHandleType.Pinned);
GCHandle gch2 = GCHandle.Alloc(cv,GCHandleType.Pinned);
mapCameraPointToColorSpace(kinect,gch.AddrOfPinnedObject(),gch2.AddrOfPinnedObject(),n);
gch.Free();
gch2.Free();
color.Clear();
for (int i=0; i<n; i++) {
color.Add(new Vector2(cv[2*i],cv[2*i+1]));
}
}
public void mapCameraPointToDepthSpace(List<Vector3> skel, ref List<Vector2> depth, int n) {
float[] sv = new float[n * 3];
float[] dv = new float[n * 2];
for (int i=0; i<n; i++) {
sv[3*i] = skel[i].x; sv[3*i+1] = skel[i].y; sv[3*i+2] = skel[i].z;
}
GCHandle gch = GCHandle.Alloc(sv,GCHandleType.Pinned);
GCHandle gch2 = GCHandle.Alloc(dv,GCHandleType.Pinned);
mapCameraPointToDepthSpace(kinect,gch.AddrOfPinnedObject(),gch2.AddrOfPinnedObject(), n);
gch.Free();
gch2.Free();
depth.Clear();
for (int i=0; i<n; i++) {
depth.Add(new Vector2(dv[2*i],dv[2*i+1]));
}
}
public void mapDepthPointToColorSpace(List<Vector2> depth,ushort[] dth,ref List<Vector2> color,int n) {
float[] dv = new float[n * 2];
float[] cv = new float[n * 2];
for (int i=0; i<n; i++) {
dv[2*i] = depth[i].x; dv[2*i+1] = depth[i].y;
}
GCHandle gch = GCHandle.Alloc(dv,GCHandleType.Pinned);
GCHandle gch2 = GCHandle.Alloc(dth,GCHandleType.Pinned);
GCHandle gch3 = GCHandle.Alloc(cv,GCHandleType.Pinned);
mapDepthPointToColorSpace(kinect,gch.AddrOfPinnedObject(),gch2.AddrOfPinnedObject(),gch3.AddrOfPinnedObject(), n);
gch.Free();
gch2.Free();
gch3.Free();
color.Clear();
for (int i=0; i<n; i++) {
color.Add(new Vector2(cv[2*i],dv[2*i+1]));
}
}
void mapDepthPointToCameraSpace(List<Vector2> depth,ushort[] dth,ref List<Vector3> skel,int n) {
float[] dv = new float[n * 2];
float[] sv = new float[n * 3];
for (int i=0; i<n; i++) {
dv[2*i] = depth[i].x; dv[2*i+1] = depth[i].y;
}
GCHandle gch = GCHandle.Alloc(dv,GCHandleType.Pinned);
GCHandle gch2 = GCHandle.Alloc(dth,GCHandleType.Pinned);
GCHandle gch3 = GCHandle.Alloc(sv,GCHandleType.Pinned);
mapDepthPointToCameraSpace(kinect,gch.AddrOfPinnedObject(),gch2.AddrOfPinnedObject(),gch3.AddrOfPinnedObject(),n);
gch.Free();
gch2.Free();
gch3.Free();
skel.Clear();
for (int i=0; i<n; i++) {
skel.Add(new Vector3(sv[3*i],sv[3*i+1],sv[3*i+2]));
}
}
// Multi Thread
public void acquire() { acquire(kinect); }
public void release() { release(kinect); }
// Audio
public void setAudio(bool flag) {
setAudio(kinect,flag);
beamAngle = getBeamAngle(kinect);
beamAngleConfidence = getBeamAngleConfidence(kinect);
audioTrackingId = getAudioTrackingId(kinect);
}
/*
public float getBeamAngle() { return getBeamAngle(kinect); }
public float getBeamAngleConfidence() { return getBeamAngleConfidence(kinect); }
*/
public void openAudio(string filename) {
System.IntPtr fname = Marshal.StringToHGlobalUni(filename);
openAudio(kinect,fname);
Marshal.FreeHGlobal(fname);
}
public void closeAudio() { closeAudio(kinect); }
public bool isOpenedAudio() { return isOpenedAudio(kinect); }
// RGB
public void setRGB() { setRGB(kinect); getRGB2(); }
public int getRGB2() {
GCHandle gch = GCHandle.Alloc(rgbImage,GCHandleType.Pinned);
int n = getRGB(kinect,gch.AddrOfPinnedObject());
gch.Free();
return n;
}
// Depth
public void setDepth() { setDepth(kinect); getDepth(); }
public int getDepth() {
GCHandle gch = GCHandle.Alloc(depthImage,GCHandleType.Pinned);
int n = getDepth(kinect,gch.AddrOfPinnedObject());
gch.Free();
return n;
}
// Infrared
public void setInfrared() { setInfrared(kinect); getInfrared(); }
public int getInfrared() {
GCHandle gch = GCHandle.Alloc(infraredImage,GCHandleType.Pinned);
int n = getInfrared(kinect,gch.AddrOfPinnedObject());
gch.Free();
return n;
}
// BodyIndex
public void setBodyIndex() {setBodyIndex(kinect); getBodyIndex(); }
public int getBodyIndex() {
GCHandle gch = GCHandle.Alloc(bodyIndexImage,GCHandleType.Pinned);
int n = getBodyIndex(kinect,gch.AddrOfPinnedObject());
gch.Free();
return n;
}
// Skeleton
public void setSkeleton() { setSkeleton(kinect); getSkeleton(); }
public int getSkeleton() {
GCHandle gch = GCHandle.Alloc(skel,GCHandleType.Pinned);
GCHandle gch2 = GCHandle.Alloc(skelState,GCHandleType.Pinned);
GCHandle gch3 = GCHandle.Alloc(skelId,GCHandleType.Pinned);
GCHandle gch4 = GCHandle.Alloc(skelTrackingId,GCHandleType.Pinned);
int n = getSkeleton(kinect,gch.AddrOfPinnedObject(),gch2.AddrOfPinnedObject(),gch3.AddrOfPinnedObject(),gch4.AddrOfPinnedObject());
gch.Free();
gch2.Free();
gch3.Free();
gch4.Free();
skeleton.Clear(); skeletonState.Clear(); skeletonId.Clear(); skeletonTrackingId.Clear();
int idx = 0, st=0;
for (int i=0; i<n; i++) {
skeleton.Add(new List<Vector3>());
skeletonState.Add(new List<int>());
for (int j=0; j<jointCount; j++) {
skeleton[i].Add(new Vector3(skel[idx++], skel[idx++], skel[idx++]));
skeletonState[i].Add(skelState[st++]);
}
skeletonId.Add(skelId[i]);
skeletonTrackingId.Add(skelTrackingId[i]);
}
return n;
}
private int faceFailCount = 0;
// Face
public void setFace() { setFace(kinect,true); getFace(); }
public int getFace() {
GCHandle gch = GCHandle.Alloc(fcPoint,GCHandleType.Pinned);
GCHandle gch2 = GCHandle.Alloc(fcRect,GCHandleType.Pinned);
GCHandle gch3 = GCHandle.Alloc(fcDirection,GCHandleType.Pinned);
GCHandle gch4 = GCHandle.Alloc(fcProperty,GCHandleType.Pinned);
GCHandle gch5 = GCHandle.Alloc(fcTrackingId,GCHandleType.Pinned);
int n = getFace(kinect,gch.AddrOfPinnedObject(),gch2.AddrOfPinnedObject(),gch3.AddrOfPinnedObject(),gch4.AddrOfPinnedObject(),gch5.AddrOfPinnedObject());
gch.Free();
gch2.Free();
gch3.Free();
gch4.Free();
gch5.Free();
if (n == 0) {
faceFailCount++;
if (faceFailCount < 10) {
return 0;
} else {
faceFailCount = 0;
}
}
facePoint.Clear(); faceRect.Clear(); faceDirection.Clear(); faceProperty.Clear(); faceTrackingId.Clear();
int idx=0, ridx=0, didx=0, pidx = 0;
for (int i=0; i<n; i++) {
facePoint.Add(new List<Vector2>());
for (int j=0; j<FacePointType_Count; j++) {
facePoint[i].Add(new Vector2(fcPoint[idx++],fcPoint[idx++]));
}
faceRect.Add(new Vector4(fcRect[ridx++],fcRect[ridx++],fcRect[ridx++],fcRect[ridx++]));
faceDirection.Add(new Vector3(fcDirection[didx++],fcDirection[didx++],fcDirection[didx++]));
faceProperty.Add(new List<int>());
for (int j=0; j<FaceProperty_Count; j++) {
faceProperty[i].Add(fcProperty[pidx++]);
}
faceTrackingId.Add(fcTrackingId[i]);
}
return n;
}
public Vector3 getFaceDirectionByTrackingId(ulong tid) {
for (int i=0; i<faceTrackingId.Count; i++) {
if (faceTrackingId[i] == tid) {
return faceDirection[i];
}
}
return Vector3.zero;
}
// HDFace
public void setHDFace() { setHDFace(kinect); getHDFace(); }
public int getHDFace() {
GCHandle gch = GCHandle.Alloc(hdfcPoint,GCHandleType.Pinned);
GCHandle gch2 = GCHandle.Alloc(hdfcTrackingId,GCHandleType.Pinned);
GCHandle gch3 = GCHandle.Alloc(hdfcStatus,GCHandleType.Pinned);
int n = getHDFace(kinect,gch.AddrOfPinnedObject(),gch2.AddrOfPinnedObject(),gch3.AddrOfPinnedObject());
gch.Free();
gch2.Free();
gch3.Free();
hdfacePoint.Clear(); hdfaceTrackingId.Clear(); hdfaceStatus.Clear();
int idx = 0;
for (int i=0; i<n; i++) {
hdfacePoint.Add(new List<Vector3>());
for (int j=0; j < HDFaceVerticesSize; j++) {
hdfacePoint[i].Add(new Vector3(hdfcPoint[idx++],hdfcPoint[idx++],hdfcPoint[idx++]));
}
hdfaceTrackingId.Add(hdfcTrackingId[i]);
hdfaceStatus.Add(hdfcStatus[i]);
}
return n;
}
// Gesture
public void setGestureFile(string filename) {
IntPtr gbd = Marshal.StringToHGlobalUni(filename);
setGestureFile(kinect,gbd);
Marshal.FreeHGlobal(gbd);
}
public int setGestureId(string name, int id) {
System.IntPtr g = Marshal.StringToHGlobalUni(name); // discrete
int n = setGestureId(kinect,g,id);
Marshal.FreeHGlobal(g);
return n;
}
public void setGesture() { setGesture(kinect); }
public int getDiscreteGesture() {
int size = bodyCount * getGidMapSize();
if (gstId.Length < size) {
gstId = new int[size];
gstFloat = new float[size];
gstTrackingId = new ulong[size];
}
GCHandle gch = GCHandle.Alloc(gstId,GCHandleType.Pinned);
GCHandle gch2 = GCHandle.Alloc(gstFloat,GCHandleType.Pinned);
GCHandle gch3 = GCHandle.Alloc(gstTrackingId,GCHandleType.Pinned);
int n = getDiscreteGesture(kinect,gch.AddrOfPinnedObject(),gch2.AddrOfPinnedObject(),gch3.AddrOfPinnedObject());
gch.Free();
gch2.Free();
gch3.Free();
discreteGesture.Clear(); gestureConfidence.Clear(); discreteGestureTrackingId.Clear();
for (int i=0; i<n; i++) {
discreteGesture.Add(gstId[i]);
gestureConfidence.Add(gstFloat[i]);
discreteGestureTrackingId.Add(gstTrackingId[i]);
}
return n;
}
public int getContinuousGesture() {
int size = bodyCount * getGidMapSize();
if (gstId.Length < size) {
gstId = new int[size];
gstFloat = new float[size];
gstTrackingId = new ulong[size];
}
GCHandle gch = GCHandle.Alloc(gstId,GCHandleType.Pinned);
GCHandle gch2 = GCHandle.Alloc(gstFloat,GCHandleType.Pinned);
GCHandle gch3 = GCHandle.Alloc(gstTrackingId,GCHandleType.Pinned);
int n = getContinuousGesture(kinect,gch.AddrOfPinnedObject(),gch2.AddrOfPinnedObject(),gch3.AddrOfPinnedObject());
gch.Free();
gch2.Free();
gch3.Free();
continuousGesture.Clear(); gestureProgress.Clear(); continuousGestureTrackingId.Clear();
for (int i=0; i<n; i++) {
continuousGesture.Add(gstId[i]);
gestureProgress.Add(gstFloat[i]);
continuousGestureTrackingId.Add(gstTrackingId[i]);
}
return n;
}
// Video
public void openVideo(string filename) {
IntPtr str = Marshal.StringToHGlobalUni(filename);
openVideo(kinect,str);
Marshal.FreeHGlobal(str);
}
public void writeVideo() { writeVideo(kinect); }
public void closeVideo() { closeVideo(kinect); }
}
public class RigBone {
public GameObject gameObject;
public HumanBodyBones bone;
public bool isValid;
public Transform transform {
get { return animator.GetBoneTransform(bone); }
}
Animator animator;
Quaternion savedLocalRotation;
Quaternion savedRotation;
public RigBone(GameObject g, HumanBodyBones b) {
gameObject = g;
bone = b;
isValid = false;
animator = gameObject.GetComponent<Animator>();
if (animator == null) {
Debug.Log("no Animator Component");
return;
}
Avatar avatar = animator.avatar;
if (avatar == null || !avatar.isHuman || !avatar.isValid) {
Debug.Log("Avatar is not Humanoid or it is not valid");
return;
}
if (animator.GetBoneTransform(bone) == null) {
Debug.Log("bone " + bone + " is note assigned in "+g);
return;
}
isValid = true;
savedLocalRotation = animator.GetBoneTransform(bone).localRotation;
savedRotation = animator.GetBoneTransform(bone).rotation;
}
public void set(float a, float x, float y, float z) {
set(Quaternion.AngleAxis(a, new Vector3(x,y,z)));
}
public void set(Quaternion q) {
animator.GetBoneTransform(bone).localRotation = q;
savedLocalRotation = q;
}
public void mul(float a, float x, float y, float z) {
mul(Quaternion.AngleAxis(a, new Vector3(x,y,z)));
}
public void mul(Quaternion q) {
Transform tr = animator.GetBoneTransform(bone);
tr.localRotation = q * tr.localRotation;
}
public void offset(float a, float x, float y, float z) {
offset(Quaternion.AngleAxis(a, new Vector3(x,y,z)));
}
public void offset(Quaternion q) {
animator.GetBoneTransform(bone).localRotation = q * savedLocalRotation;
}
public void gset(float a, float x, float y, float z) {
gset(Quaternion.AngleAxis(a, new Vector3(x,y,z)));
}
public void gset(Quaternion q) {
animator.GetBoneTransform(bone).rotation = q;
savedLocalRotation = q;
}
public void gmul(float a, float x, float y, float z) {
gmul(Quaternion.AngleAxis(a, new Vector3(x,y,z)));
}
public void gmul(Quaternion q) {
Transform tr = animator.GetBoneTransform(bone);
tr.rotation = q * tr.rotation;
}
public void goffset(float a, float x, float y, float z) {
goffset(Quaternion.AngleAxis(a, new Vector3(x,y,z)));
}
public void goffset(Quaternion q) {
animator.GetBoneTransform(bone).rotation = q * savedRotation;
}
public void changeBone(HumanBodyBones b) {
bone = b;
savedLocalRotation = animator.GetBoneTransform(bone).localRotation;
savedRotation = animator.GetBoneTransform(bone).rotation;
}
}
class HumanoidSkeleton {
protected static int[] jointSegment = new int[] {
Kinect.JointType_SpineBase, Kinect.JointType_SpineMid, // Spine
Kinect.JointType_Neck, Kinect.JointType_Head, // Neck
// left
Kinect.JointType_ShoulderLeft, Kinect.JointType_ElbowLeft, // LeftUpperArm
Kinect.JointType_ElbowLeft, Kinect.JointType_WristLeft, // LeftLowerArm
Kinect.JointType_WristLeft, Kinect.JointType_HandLeft, // LeftHand
Kinect.JointType_HipLeft, Kinect.JointType_KneeLeft, // LeftUpperLeg
Kinect.JointType_KneeLeft, Kinect.JointType_AnkleLeft, // LeftLowerLeg6
Kinect.JointType_AnkleLeft, Kinect.JointType_FootLeft, // LeftFoot
// right
Kinect.JointType_ShoulderRight, Kinect.JointType_ElbowRight, // RightUpperArm
Kinect.JointType_ElbowRight, Kinect.JointType_WristRight, // RightLowerArm
Kinect.JointType_WristRight, Kinect.JointType_HandRight, // RightHand
Kinect.JointType_HipRight, Kinect.JointType_KneeRight, // RightUpperLeg
Kinect.JointType_KneeRight, Kinect.JointType_AnkleRight, // RightLowerLeg
Kinect.JointType_AnkleRight, Kinect.JointType_FootRight, // RightFoot
};
public Vector3[] joint = new Vector3[Kinect.jointCount];
public int[] jointState = new int[Kinect.jointCount];
protected Dictionary<HumanBodyBones,Vector3> trackingSegment = null;
protected Dictionary<HumanBodyBones, int> trackingState = null;
protected static HumanBodyBones[] humanBone = new HumanBodyBones[] {
HumanBodyBones.Hips,
HumanBodyBones.Spine,
HumanBodyBones.Chest,
HumanBodyBones.Neck,
HumanBodyBones.Head,
HumanBodyBones.LeftUpperArm,
HumanBodyBones.LeftLowerArm,
HumanBodyBones.LeftHand,
HumanBodyBones.LeftUpperLeg,
HumanBodyBones.LeftLowerLeg,
HumanBodyBones.LeftFoot,
HumanBodyBones.RightUpperArm,
HumanBodyBones.RightLowerArm,
HumanBodyBones.RightHand,
HumanBodyBones.RightUpperLeg,
HumanBodyBones.RightLowerLeg,
HumanBodyBones.RightFoot,
};
protected static HumanBodyBones[] targetBone = new HumanBodyBones[] {
HumanBodyBones.Spine,
HumanBodyBones.Neck,
HumanBodyBones.LeftUpperArm,
HumanBodyBones.LeftLowerArm,
HumanBodyBones.LeftHand,
HumanBodyBones.LeftUpperLeg,
HumanBodyBones.LeftLowerLeg,
HumanBodyBones.LeftFoot,
HumanBodyBones.RightUpperArm,
HumanBodyBones.RightLowerArm,
HumanBodyBones.RightHand,
HumanBodyBones.RightUpperLeg,
HumanBodyBones.RightLowerLeg,
HumanBodyBones.RightFoot,
};
public GameObject humanoid;
protected Dictionary<HumanBodyBones, RigBone> rigBone = null;
protected bool isSavedPosition = false;
protected Vector3 savedPosition;
protected Quaternion savedHumanoidRotation;
public HumanoidSkeleton(GameObject h) {
humanoid = h;
rigBone = new Dictionary<HumanBodyBones, RigBone>();
foreach (HumanBodyBones bone in humanBone) {
rigBone[bone] = new RigBone(humanoid,bone);
}
savedHumanoidRotation = humanoid.transform.rotation;
trackingSegment = new Dictionary<HumanBodyBones,Vector3>(targetBone.Length);
trackingState = new Dictionary<HumanBodyBones, int>(targetBone.Length);
}
protected void swapJoint(int a, int b) {
Vector3 tmp = joint[a]; joint[a] = joint[b]; joint[b] = tmp;
int t = jointState[a]; jointState[a] = jointState[b]; jointState[b] = t;
}
public void set(Kinect kinect, int n, bool mirrored = false, bool move=false, bool headMove=true) {
Vector3 faceDir = kinect.getFaceDirectionByTrackingId(kinect.skeletonTrackingId[n]);
if (isSavedPosition == false
&& kinect.skeletonState[n][Kinect.JointType_SpineBase] != Kinect.TrackingState_NotTracked) {
isSavedPosition = true;
savedPosition = kinect.skeleton[n][Kinect.JointType_SpineBase];
}
for (int i=0; i<kinect.skeleton[n].Count; i++) {
Vector3 jt = kinect.skeleton[n][i];
if (mirrored) {
joint[i] = new Vector3(-jt.x, jt.y, -jt.z);
} else {
joint[i] = new Vector3(jt.x, jt.y, savedPosition.z*2 - jt.z);
}
jointState[i] = kinect.skeletonState[n][i];
}
if (mirrored) {
swapJoint(Kinect.JointType_ShoulderLeft, Kinect.JointType_ShoulderRight);
swapJoint(Kinect.JointType_ElbowLeft, Kinect.JointType_ElbowRight);
swapJoint(Kinect.JointType_WristLeft, Kinect.JointType_WristRight);
swapJoint(Kinect.JointType_HandLeft, Kinect.JointType_HandRight);
swapJoint(Kinect.JointType_HipLeft, Kinect.JointType_HipRight);
swapJoint(Kinect.JointType_KneeLeft, Kinect.JointType_KneeRight);
swapJoint(Kinect.JointType_AnkleLeft, Kinect.JointType_AnkleRight);
swapJoint(Kinect.JointType_FootLeft, Kinect.JointType_FootRight);
swapJoint(Kinect.JointType_HandTipLeft, Kinect.JointType_HandTipRight);
swapJoint(Kinect.JointType_ThumbLeft, Kinect.JointType_ThumbRight);
}
for (int i=0; i<targetBone.Length; i++) {
int s = jointSegment[2*i], e = jointSegment[2*i+1];
trackingSegment[targetBone[i]] = joint[e] - joint[s];
trackingState[targetBone[i]] = System.Math.Min(jointState[e],jointState[s]);
}
Vector3 waist = joint[Kinect.JointType_HipRight] - joint[Kinect.JointType_HipLeft];
waist = new Vector3(waist.x, 0, waist.z);
Quaternion rot = Quaternion.FromToRotation(Vector3.right,waist);
Quaternion rotInv = Quaternion.Inverse(rot);
Vector3 shoulder = joint[Kinect.JointType_ShoulderRight] - joint[Kinect.JointType_ShoulderLeft];
shoulder = new Vector3(shoulder.x, 0, shoulder.z);
//Quaternion srot = Quaternion.FromToRotation(Vector3.right,shoulder);
//Quaternion srotInv = Quaternion.Inverse(srot);
humanoid.transform.rotation = Quaternion.identity;
//humanoid.transform.rotation = savedHumanoidRotation;
foreach (HumanBodyBones bone in targetBone) {
if (rigBone[bone].isValid && trackingState[bone] != Kinect.TrackingState_NotTracked) {
rigBone[bone].transform.rotation = rotInv * Quaternion.FromToRotation(Vector3.up,trackingSegment[bone]);
}
}
//rigBone[HumanBodyBones.Chest].offset(srot);
if (headMove && faceDir.magnitude > 1e-6) {
float pitch = faceDir.x, yaw = faceDir.y, roll = faceDir.z;
if (mirrored) {
pitch = -pitch;
roll = -roll;
} else {
pitch = -pitch;
yaw = -yaw;
}
rigBone[HumanBodyBones.Head].transform.rotation = Util.toQ(pitch, yaw, roll);
}
Quaternion bodyRot = rot;
if (mirrored) {
bodyRot = Quaternion.AngleAxis(180,Vector3.up) * bodyRot;
}
humanoid.transform.rotation = bodyRot;
if (move == true) {
Vector3 m = joint[Kinect.JointType_SpineBase];
if (mirrored) m = new Vector3(-m.x, m.y, -m.z);
humanoid.transform.position = m;
}
}
}
class Util {
public static Quaternion toQ (float pitch, float yaw, float roll) {
yaw *= Mathf.Deg2Rad;
pitch *= Mathf.Deg2Rad;
roll *= Mathf.Deg2Rad;
float rollOver2 = roll * 0.5f;
float sinRollOver2 = (float)System.Math.Sin ((double)rollOver2);
float cosRollOver2 = (float)System.Math.Cos ((double)rollOver2);
float pitchOver2 = pitch * 0.5f;
float sinPitchOver2 = (float)System.Math.Sin ((double)pitchOver2);
float cosPitchOver2 = (float)System.Math.Cos ((double)pitchOver2);
float yawOver2 = yaw * 0.5f;
float sinYawOver2 = (float)System.Math.Sin ((double)yawOver2);
float cosYawOver2 = (float)System.Math.Cos ((double)yawOver2);
Quaternion result;
result.w = cosYawOver2 * cosPitchOver2 * cosRollOver2 + sinYawOver2 * sinPitchOver2 * sinRollOver2;
result.x = cosYawOver2 * sinPitchOver2 * cosRollOver2 + sinYawOver2 * cosPitchOver2 * sinRollOver2;
result.y = sinYawOver2 * cosPitchOver2 * cosRollOver2 - cosYawOver2 * sinPitchOver2 * sinRollOver2;
result.z = cosYawOver2 * cosPitchOver2 * sinRollOver2 - sinYawOver2 * sinPitchOver2 * cosRollOver2;
return result;
}
}
class UnityChanSkeleton: HumanoidSkeleton {
new protected static int[] jointSegment = new int[] {
// left
Kinect.JointType_ShoulderLeft, Kinect.JointType_ElbowLeft, // LeftUpperArm
Kinect.JointType_ElbowLeft, Kinect.JointType_WristLeft, // LeftLowerArm
Kinect.JointType_WristLeft, Kinect.JointType_HandLeft, // LeftHand
Kinect.JointType_HipLeft, Kinect.JointType_KneeLeft, // LeftUpperLeg
Kinect.JointType_KneeLeft, Kinect.JointType_AnkleLeft, // LeftLowerLeg6
Kinect.JointType_AnkleLeft, Kinect.JointType_FootLeft, // LeftFoot
// right
Kinect.JointType_ShoulderRight, Kinect.JointType_ElbowRight, // RightUpperArm
Kinect.JointType_ElbowRight, Kinect.JointType_WristRight, // RightLowerArm
Kinect.JointType_WristRight, Kinect.JointType_HandRight, // RightHand
Kinect.JointType_HipRight, Kinect.JointType_KneeRight, // RightUpperLeg
Kinect.JointType_KneeRight, Kinect.JointType_AnkleRight, // RightLowerLeg
Kinect.JointType_AnkleRight, Kinect.JointType_FootRight, // RightFoot
};
new protected static HumanBodyBones[] targetBone = new HumanBodyBones[] {
HumanBodyBones.LeftUpperArm,
HumanBodyBones.LeftLowerArm,
HumanBodyBones.LeftHand,
HumanBodyBones.LeftUpperLeg,
HumanBodyBones.LeftLowerLeg,
HumanBodyBones.LeftFoot,
HumanBodyBones.RightUpperArm,
HumanBodyBones.RightLowerArm,
HumanBodyBones.RightHand,
HumanBodyBones.RightUpperLeg,
HumanBodyBones.RightLowerLeg,
HumanBodyBones.RightFoot,
};
public UnityChanSkeleton(GameObject h):base(h) {}
new public void set(Kinect kinect, int n, bool mirrored=false, bool move=false, bool headMove=false) {
Vector3 faceDir = kinect.getFaceDirectionByTrackingId(kinect.skeletonTrackingId[n]);
if (isSavedPosition == false
&& kinect.skeletonState[n][Kinect.JointType_SpineBase] != Kinect.TrackingState_NotTracked) {
isSavedPosition = true;
savedPosition = kinect.skeleton[n][Kinect.JointType_SpineBase];
}
for (int i=0; i<kinect.skeleton[n].Count; i++) {
Vector3 jt = kinect.skeleton[n][i];
if (mirrored) {
joint[i] = new Vector3(-jt.x, jt.y, -jt.z);
} else {
joint[i] = new Vector3(jt.x, jt.y, savedPosition.z*2 - jt.z);
}
jointState[i] = kinect.skeletonState[n][i];
}
if (mirrored) {
swapJoint(Kinect.JointType_ShoulderLeft, Kinect.JointType_ShoulderRight);
swapJoint(Kinect.JointType_ElbowLeft, Kinect.JointType_ElbowRight);
swapJoint(Kinect.JointType_WristLeft, Kinect.JointType_WristRight);
swapJoint(Kinect.JointType_HandLeft, Kinect.JointType_HandRight);
swapJoint(Kinect.JointType_HipLeft, Kinect.JointType_HipRight);
swapJoint(Kinect.JointType_KneeLeft, Kinect.JointType_KneeRight);
swapJoint(Kinect.JointType_AnkleLeft, Kinect.JointType_AnkleRight);
swapJoint(Kinect.JointType_FootLeft, Kinect.JointType_FootRight);
swapJoint(Kinect.JointType_HandTipLeft, Kinect.JointType_HandTipRight);
swapJoint(Kinect.JointType_ThumbLeft, Kinect.JointType_ThumbRight);
}
for (int i=0; i<targetBone.Length; i++) {
int s = jointSegment[2*i], e = jointSegment[2*i+1];
trackingSegment[targetBone[i]] = joint[e] - joint[s];
trackingState[targetBone[i]] = System.Math.Min(jointState[e],jointState[s]);
}
savedHumanoidRotation = humanoid.transform.rotation;
humanoid.transform.rotation = Quaternion.identity;
Vector3 waist = joint[Kinect.JointType_HipRight] - joint[Kinect.JointType_HipLeft];
waist = new Vector3(waist.x, 0, waist.z);
Quaternion rot = Quaternion.FromToRotation(Vector3.right,waist);
Quaternion rotInv = Quaternion.Inverse(rot);
Vector3 shoulder = joint[Kinect.JointType_ShoulderRight] - joint[Kinect.JointType_ShoulderLeft];
shoulder = new Vector3(shoulder.x, 0, shoulder.z);
Quaternion srot = Quaternion.FromToRotation(Vector3.right,shoulder);
Quaternion defaultQ = Quaternion.AngleAxis(90, new Vector3(0,1,0) )
* Quaternion.AngleAxis( -90, new Vector3(0,0,1 ) );
foreach (HumanBodyBones b in targetBone) {
if (rigBone[b].isValid && trackingState[b] != Kinect.TrackingState_NotTracked) {
rigBone[b].transform.rotation = rotInv * Quaternion.FromToRotation(Vector3.up,trackingSegment[b]) * defaultQ;
}
}
Quaternion q = Quaternion.AngleAxis(-90, new Vector3(0,1,0))
* Quaternion.AngleAxis(-90, new Vector3(0,0,1));
if (headMove && faceDir.magnitude > 1e-6) {
float pitch = faceDir.x, yaw = faceDir.y, roll = faceDir.z;
if (mirrored) {
pitch = -pitch;
roll = -roll;
} else {
pitch = -pitch;
yaw = -yaw;
}
rigBone[HumanBodyBones.Head].transform.rotation = Util.toQ(pitch, yaw, roll) * q;
}
if (rigBone[HumanBodyBones.Chest].isValid)
rigBone[HumanBodyBones.Chest].transform.rotation = srot * q;
if (mirrored) {
humanoid.transform.rotation = Quaternion.AngleAxis(180,Vector3.up) * rot;
} else {
humanoid.transform.rotation = rot;
}
if (move == true) {
Vector3 m = joint[Kinect.JointType_SpineBase];
if (mirrored) m = new Vector3(-m.x, m.y, -m.z);
humanoid.transform.position = m;
}
return;
}
}
}
|
上部のメニューから「Assets」-> 「Create」 -> 「C# Script」 -> ファイル名は Sample01
| Sample01.cs |
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Sample01 : MonoBehaviour {
NtUnity.Kinect nt;
void Start () {
nt = new NtUnity.Kinect();
}
void Update () {
nt.setRGB();
nt.setSkeleton();
nt.setFace();
nt.imshowBlack();
Debug.Log("n = " + nt.skeleton.Count);
}
void OnApplicationQuit() {
nt.stopKinect();
}
}
|
Files -> Save Scene as .. -> Sample01
実行中のキャプチャ画面はこちら。
上記のzipファイルには必ずしも最新の "NtKinectDLL.dll" と "NtUnity.cs" が含まれていない場合があるので、 こちらから最新版をダウンロードして 差し替えてお使い下さい。