Preface
What Is This Document?
This Best Practices Guide is a manual to help developers obtain the best performance from NVIDIA® CUDA® GPUs. It presents established parallelization and optimization techniques and explains coding metaphors and idioms that can greatly simplify programming for CUDA-capable GPU architectures.
While the contents can be used as a reference manual, you should be aware that some topics are revisited in different contexts as various programming and configuration topics are explored. As a result, it is recommended that first-time readers proceed through the guide sequentially. This approach will greatly improve your understanding of effective programming practices and enable you to better use the guide for reference later.
Who Should Read This Guide?
The discussions in this guide all use the C programming language, so you should be comfortable reading C code.
This guide refers to and relies on several other documents that you should have at your disposal for reference, all of which are available at no cost from the CUDA website http://developer.nvidia.com/cuda-downloads. The following documents are especially important resources:
- CUDA Installation Guide
- CUDA C Programming Guide
- CUDA Toolkit Reference Manual
In particular, the optimization section of this guide assumes that you have already successfully downloaded and installed the CUDA Toolkit (if not, please refer to the relevant CUDA Installation Guide for your platform) and that you have a basic familiarity with the CUDA C programming language and environment (if not, please refer to the CUDA C Programming Guide).
Assess, Parallelize, Optimize, Deploy
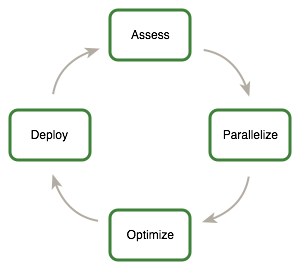
This guide introduces the Assess, Parallelize, Optimize, Deploy(APOD) design cycle for applications with the goal of helping application developers to rapidly identify the portions of their code that would most readily benefit from GPU acceleration, rapidly realize that benefit, and begin leveraging the resulting speedups in production as early as possible.
APOD is a cyclical process: initial speedups can be achieved, tested, and deployed with only minimal initial investment of time, at which point the cycle can begin again by identifying further optimization opportunities, seeing additional speedups, and then deploying the even faster versions of the application into production.
Assess
For an existing project, the first step is to assess the application to locate the parts of the code that are responsible for the bulk of the execution time. Armed with this knowledge, the developer can evaluate these bottlenecks for parallelization and start to investigate GPU acceleration.
By understanding the end-user's requirements and constraints and by applying Amdahl's and Gustafson's laws, the developer can determine the upper bound of performance improvement from acceleration of the identified portions of the application.
Parallelize
Having identified the hotspots and having done the basic exercises to set goals and expectations, the developer needs to parallelize the code. Depending on the original code, this can be as simple as calling into an existing GPU-optimized library such as cuBLAS, cuFFT, or Thrust, or it could be as simple as adding a few preprocessor directives as hints to a parallelizing compiler.
On the other hand, some applications' designs will require some amount of refactoring to expose their inherent parallelism. As even future CPU architectures will require exposing this parallelism in order to improve or simply maintain the performance of sequential applications, the CUDA family of parallel programming languages (CUDA C/C++, CUDA Fortran, etc.) aims to make the expression of this parallelism as simple as possible, while simultaneously enabling operation on CUDA-capable GPUs designed for maximum parallel throughput.
Optimize
After each round of application parallelization is complete, the developer can move to optimizing the implementation to improve performance. Since there are many possible optimizations that can be considered, having a good understanding of the needs of the application can help to make the process as smooth as possible. However, as with APOD as a whole, program optimization is an iterative process (identify an opportunity for optimization, apply and test the optimization, verify the speedup achieved, and repeat), meaning that it is not necessary for a programmer to spend large amounts of time memorizing the bulk of all possible optimization strategies prior to seeing good speedups. Instead, strategies can be applied incrementally as they are learned.
Optimizations can be applied at various levels, from overlapping data transfers with computation all the way down to fine-tuning floating-point operation sequences. The available profiling tools are invaluable for guiding this process, as they can help suggest a next-best course of action for the developer's optimization efforts and provide references into the relevant portions of the optimization section of this guide.
Deploy
Having completed the GPU acceleration of one or more components of the application it is possible to compare the outcome with the original expectation. Recall that the initial assess step allowed the developer to determine an upper bound for the potential speedup attainable by accelerating given hotspots.
Before tackling other hotspots to improve the total speedup, the developer should consider taking the partially parallelized implementation and carry it through to production. This is important for a number of reasons; for example, it allows the user to profit from their investment as early as possible (the speedup may be partial but is still valuable), and it minimizes risk for the developer and the user by providing an evolutionary rather than revolutionary set of changes to the application.
Recommendations and Best Practices
Throughout this guide, specific recommendations are made regarding the design and implementation of CUDA C code. These recommendations are categorized by priority, which is a blend of the effect of the recommendation and its scope. Actions that present substantial improvements for most CUDA applications have the highest priority, while small optimizations that affect only very specific situations are given a lower priority.
Before implementing lower priority recommendations, it is good practice to make sure all higher priority recommendations that are relevant have already been applied. This approach will tend to provide the best results for the time invested and will avoid the trap of premature optimization.
The criteria of benefit and scope for establishing priority will vary depending on the nature of the program. In this guide, they represent a typical case. Your code might reflect different priority factors. Regardless of this possibility, it is good practice to verify that no higher-priority recommendations have been overlooked before undertaking lower-priority items.
1. Assessing Your Application
From supercomputers to mobile phones, modern processors increasingly rely on parallelism to provide performance. The core computational unit, which includes control, arithmetic, registers and typically some cache, is replicated some number of times and connected to memory via a network. As a result, all modern processors require parallel code in order to achieve good utilization of their computational power.
While processors are evolving to expose more fine-grained parallelism to the programmer, many existing applications have evolved either as serial codes or as coarse-grained parallel codes (for example, where the data is decomposed into regions processed in parallel, with sub-regions shared using MPI). In order to profit from any modern processor architecture, GPUs included, the first steps are to assess the application to identify the hotspots, determine whether they can be parallelized, and understand the relevant workloads both now and in the future.
2. Heterogeneous Computing
CUDA programming involves running code on two different platforms concurrently: a host system with one or more CPUs and one or more CUDA-enabled NVIDIA GPU devices.
While NVIDIA GPUs are frequently associated with graphics, they are also powerful arithmetic engines capable of running thousands of lightweight threads in parallel. This capability makes them well suited to computations that can leverage parallel execution.
However, the device is based on a distinctly different design from the host system, and it's important to understand those differences and how they determine the performance of CUDA applications in order to use CUDA effectively.
2.1. Differences between Host and Device
The primary differences are in threading model and in separate physical memories:
- Threading resources
- Execution pipelines on host systems can support a limited number of concurrent threads. Servers that have four hex-core processors today can run only 24 threads concurrently (or 48 if the CPUs support Hyper-Threading.) By comparison, the smallest executable unit of parallelism on a CUDA device comprises 32 threads (termed a warp of threads). Modern NVIDIA GPUs can support up to 1536 active threads concurrently per multiprocessor (see Features and Specifications of the CUDA C Programming Guide) On GPUs with 16 multiprocessors, this leads to more than 24,000 concurrently active threads.
- Threads
- Threads on a CPU are generally heavyweight entities. The operating system must swap threads on and off CPU execution channels to provide multithreading capability. Context switches (when two threads are swapped) are therefore slow and expensive. By comparison, threads on GPUs are extremely lightweight. In a typical system, thousands of threads are queued up for work (in warps of 32 threads each). If the GPU must wait on one warp of threads, it simply begins executing work on another. Because separate registers are allocated to all active threads, no swapping of registers or other state need occur when switching among GPU threads. Resources stay allocated to each thread until it completes its execution. In short, CPU cores are designed to minimize latency for one or two threads at a time each, whereas GPUs are designed to handle a large number of concurrent, lightweight threads in order to maximize throughput.
- RAM
- The host system and the device each have their own distinct attached physical memories. As the host and device memories are separated by the PCI Express (PCIe) bus, items in the host memory must occasionally be communicated across the bus to the device memory or vice versa as described in What Runs on a CUDA-Enabled Device?
These are the primary hardware differences between CPU hosts and GPU devices with respect to parallel programming. Other differences are discussed as they arise elsewhere in this document. Applications composed with these differences in mind can treat the host and device together as a cohesive heterogeneous system wherein each processing unit is leveraged to do the kind of work it does best: sequential work on the host and parallel work on the device.
2.2. What Runs on a CUDA-Enabled Device?
The following issues should be considered when determining what parts of an application to run on the device:
- The device is ideally suited for computations that can be run on numerous data elements simultaneously in parallel. This typically involves arithmetic on large data sets (such as matrices) where the same operation can be performed across thousands, if not millions, of elements at the same time. This is a requirement for good performance on CUDA: the software must use a large number (generally thousands or tens of thousands) of concurrent threads. The support for running numerous threads in parallel derives from CUDA's use of a lightweight threading model described above.
- For best performance, there should be some coherence in memory access by adjacent threads running on the device. Certain memory access patterns enable the hardware to coalesce groups of reads or writes of multiple data items into one operation. Data that cannot be laid out so as to enable coalescing, or that doesn't have enough locality to use the L1 or texture caches effectively, will tend to see lesser speedups when used in computations on CUDA.
- To use CUDA, data values must be transferred from the host to
the device along the PCI Express (PCIe) bus. These transfers
are costly in terms of performance and should be minimized.
(See Data Transfer Between Host and Device.)
This cost has several ramifications:
-
The complexity of operations should justify the cost of moving data to and from the device. Code that transfers data for brief use by a small number of threads will see little or no performance benefit. The ideal scenario is one in which many threads perform a substantial amount of work.
For example, transferring two matrices to the device to perform a matrix addition and then transferring the results back to the host will not realize much performance benefit. The issue here is the number of operations performed per data element transferred. For the preceding procedure, assuming matrices of size NxN, there are N2 operations (additions) and 3N2 elements transferred, so the ratio of operations to elements transferred is 1:3 or O(1). Performance benefits can be more readily achieved when this ratio is higher. For example, a matrix multiplication of the same matrices requires N3 operations (multiply-add), so the ratio of operations to elements transferred is O(N), in which case the larger the matrix the greater the performance benefit. The types of operations are an additional factor, as additions have different complexity profiles than, for example, trigonometric functions. It is important to include the overhead of transferring data to and from the device in determining whether operations should be performed on the host or on the device.
- Data should be kept on the device as long as possible. Because transfers should be minimized, programs that run multiple kernels on the same data should favor leaving the data on the device between kernel calls, rather than transferring intermediate results to the host and then sending them back to the device for subsequent calculations. So, in the previous example, had the two matrices to be added already been on the device as a result of some previous calculation, or if the results of the addition would be used in some subsequent calculation, the matrix addition should be performed locally on the device. This approach should be used even if one of the steps in a sequence of calculations could be performed faster on the host. Even a relatively slow kernel may be advantageous if it avoids one or more PCIe transfers. Data Transfer Between Host and Device provides further details, including the measurements of bandwidth between the host and the device versus within the device proper.
-
3. Application Profiling
3.1. Profile
Many codes accomplish a significant portion of the work with a relatively small amount of code. Using a profiler, the developer can identify such hotspots and start to compile a list of candidates for parallelization.
3.1.1. Creating the Profile
There are many possible approaches to profiling the code, but in all cases the objective is the same: to identify the function or functions in which the application is spending most of its execution time.
The most important consideration with any profiling activity is to ensure that the workload is realistic - i.e., that information gained from the test and decisions based upon that information are relevant to real data. Using unrealistic workloads can lead to sub-optimal results and wasted effort both by causing developers to optimize for unrealistic problem sizes and by causing developers to concentrate on the wrong functions.
There are a number of tools that can be used to generate the profile. The following example is based on gprof, which is an open-source profiler for Linux platforms from the GNU Binutils collection.
$ gcc -O2 -g -pg myprog.c $ gprof ./a.out > profile.txt Each sample counts as 0.01 seconds. % cumulative self self total time seconds seconds calls ms/call ms/call name 33.34 0.02 0.02 7208 0.00 0.00 genTimeStep 16.67 0.03 0.01 240 0.04 0.12 calcStats 16.67 0.04 0.01 8 1.25 1.25 calcSummaryData 16.67 0.05 0.01 7 1.43 1.43 write 16.67 0.06 0.01 mcount 0.00 0.06 0.00 236 0.00 0.00 tzset 0.00 0.06 0.00 192 0.00 0.00 tolower 0.00 0.06 0.00 47 0.00 0.00 strlen 0.00 0.06 0.00 45 0.00 0.00 strchr 0.00 0.06 0.00 1 0.00 50.00 main 0.00 0.06 0.00 1 0.00 0.00 memcpy 0.00 0.06 0.00 1 0.00 10.11 print 0.00 0.06 0.00 1 0.00 0.00 profil 0.00 0.06 0.00 1 0.00 50.00 report
3.1.2. Identifying Hotspots
In the example above, we can clearly see that the function genTimeStep() takes one-third of the total running time of the application. This should be our first candidate function for parallelization. Understanding Scaling discusses the potential benefit we might expect from such parallelization.
It is worth noting that several of the other functions in the above example also take up a significant portion of the overall running time, such as calcStats() and calcSummaryData(). Parallelizing these functions as well should increase our speedup potential. However, since APOD is a cyclical process, we might opt to parallelize these functions in a subsequent APOD pass, thereby limiting the scope of our work in any given pass to a smaller set of incremental changes.
3.1.3. Understanding Scaling
The amount of performance benefit an application will realize by running on CUDA depends entirely on the extent to which it can be parallelized. Code that cannot be sufficiently parallelized should run on the host, unless doing so would result in excessive transfers between the host and the device.
By understanding how applications can scale it is possible to set expectations and plan an incremental parallelization strategy. Strong Scaling and Amdahl's Law describes strong scaling, which allows us to set an upper bound for the speedup with a fixed problem size. Weak Scaling and Gustafson's Law describes weak scaling, where the speedup is attained by growing the problem size. In many applications, a combination of strong and weak scaling is desirable.
3.1.3.1. Strong Scaling and Amdahl's Law
Strong scaling is a measure of how, for a fixed overall problem size, the time to solution decreases as more processors are added to a system. An application that exhibits linear strong scaling has a speedup equal to the number of processors used.
Strong scaling is usually equated with Amdahl's Law, which specifies the maximum speedup that can be expected by parallelizing portions of a serial program. Essentially, it states that the maximum speedup S of a program is:
Here P is the fraction of the total serial execution time taken by the portion of code that can be parallelized and N is the number of processors over which the parallel portion of the code runs.
The larger N is(that is, the greater the number of processors), the smaller the P/N fraction. It can be simpler to view N as a very large number, which essentially transforms the equation into . Now, if 3/4 of the running time of a sequential program is parallelized, the maximum speedup over serial code is 1 / (1 - 3/4) = 4.
In reality, most applications do not exhibit perfectly linear strong scaling, even if they do exhibit some degree of strong scaling. For most purposes, the key point is that the larger the parallelizable portion P is, the greater the potential speedup. Conversely, if P is a small number (meaning that the application is not substantially parallelizable), increasing the number of processors N does little to improve performance. Therefore, to get the largest speedup for a fixed problem size, it is worthwhile to spend effort on increasing P, maximizing the amount of code that can be parallelized.
3.1.3.2. Weak Scaling and Gustafson's Law
Weak scaling is a measure of how the time to solution changes as more processors are added to a system with a fixed problem size per processor; i.e., where the overall problem size increases as the number of processors is increased.
Weak scaling is often equated with Gustafson's Law, which states that in practice, the problem size scales with the number of processors. Because of this, the maximum speedup S of a program is:
Here P is the fraction of the total serial execution time taken by the portion of code that can be parallelized and N is the number of processors over which the parallel portion of the code runs.
Another way of looking at Gustafson's Law is that it is not the problem size that remains constant as we scale up the system but rather the execution time. Note that Gustafson's Law assumes that the ratio of serial to parallel execution remains constant, reflecting additional cost in setting up and handling the larger problem.
3.1.3.3. Applying Strong and Weak Scaling
Understanding which type of scaling is most applicable to an application is an important part of estimating speedup. For some applications the problem size will remain constant and hence only strong scaling is applicable. An example would be modeling how two molecules interact with each other, where the molecule sizes are fixed.
For other applications, the problem size will grow to fill the available processors. Examples include modeling fluids or structures as meshes or grids and some Monte Carlo simulations, where increasing the problem size provides increased accuracy.
Having understood the application profile, the developer should understand how the problem size would change if the computational performance changes and then apply either Amdahl's or Gustafson's Law to determine an upper bound for the speedup.
4. Parallelizing Your Application
Having identified the hotspots and having done the basic exercises to set goals and expectations, the developer needs to parallelize the code. Depending on the original code, this can be as simple as calling into an existing GPU-optimized library such as cuBLAS, cuFFT, or Thrust, or it could be as simple as adding a few preprocessor directives as hints to a parallelizing compiler.
On the other hand, some applications' designs will require some amount of refactoring to expose their inherent parallelism. As even future CPU architectures will require exposing this parallelism in order to improve or simply maintain the performance of sequential applications, the CUDA family of parallel programming languages (CUDA C/C++, CUDA Fortran, etc.) aims to make the expression of this parallelism as simple as possible, while simultaneously enabling operation on CUDA-capable GPUs designed for maximum parallel throughput.
5. Getting Started
There are several key strategies for parallelizing sequential code. While the details of how to apply these strategies to a particular application is a complex and problem-specific topic, the general themes listed here apply regardless of whether we are parallelizing code to run on for multicore CPUs or for use on CUDA GPUs.
5.1. Parallel Libraries
The most straightforward approach to parallelizing an application is to leverage existing libraries that take advantage of parallel architectures on our behalf. The CUDA Toolkit includes a number of such libraries that have been fine-tuned for NVIDIA CUDA GPUs, such as cuBLAS, cuFFT, and so on.
The key here is that libraries are most useful when they match well with the needs of the application. Applications already using other BLAS libraries can often quite easily switch to cuBLAS, for example, whereas applications that do little to no linear algebra will have little use for cuBLAS. The same goes for other CUDA Toolkit libraries: cuFFT has an interface similar to that of FFTW, etc.
Also of note is the Thrust library, which is a parallel C++ template library similar to the C++ Standard Template Library. Thrust provides a rich collection of data parallel primitives such as scan, sort, and reduce, which can be composed together to implement complex algorithms with concise, readable source code. By describing your computation in terms of these high-level abstractions you provide Thrust with the freedom to select the most efficient implementation automatically. As a result, Thrust can be utilized in rapid prototyping of CUDA applications, where programmer productivity matters most, as well as in production, where robustness and absolute performance are crucial.
5.2. Parallelizing Compilers
Another common approach to parallelization of sequential codes is to make use of parallelizing compilers. Often this means the use of directives-based approaches, where the programmer uses a pragma or other similar notation to provide hints to the compiler about where parallelism can be found without needing to modify or adapt the underlying code itself. By exposing parallelism to the compiler, directives allow the compiler to do the detailed work of mapping the computation onto the parallel architecture.
The OpenACC standard provides a set of compiler directives to specify loops and regions of code in standard C, C++ and Fortran that should be offloaded from a host CPU to an attached accelerator such as a CUDA GPU. The details of managing the accelerator device are handled implicitly by an OpenACC-enabled compiler and runtime.
See http://www.openacc.org/ for details.
5.3. Coding to Expose Parallelism
For applications that need additional functionality or performance beyond what existing parallel libraries or parallelizing compilers can provide, parallel programming languages such as CUDA C/C++ that integrate seamlessly with existing sequential code are essential.
Once we have located a hotspot in our application's profile assessment and determined that custom code is the best approach, we can use CUDA C/C++ to expose the parallelism in that portion of our code as a CUDA kernel. We can then launch this kernel onto the GPU and retrieve the results without requiring major rewrites to the rest of our application.
This approach is most straightforward when the majority of the total running time of our application is spent in a few relatively isolated portions of the code. More difficult to parallelize are applications with a very flat profile - i.e., applications where the time spent is spread out relatively evenly across a wide portion of the code base. For the latter variety of application, some degree of code refactoring to expose the inherent parallelism in the application might be necessary, but keep in mind that this refactoring work will tend to benefit all future architectures, CPU and GPU alike, so it is well worth the effort should it become necessary.
6. Getting the Right Answer
Obtaining the right answer is clearly the principal goal of all computation. On parallel systems, it is possible to run into difficulties not typically found in traditional serial-oriented programming. These include threading issues, unexpected values due to the way floating-point values are computed, and challenges arising from differences in the way CPU and GPU processors operate. This chapter examines issues that can affect the correctness of returned data and points to appropriate solutions.
6.1. Verification
6.1.1. Reference Comparison
A key aspect of correctness verification for modifications to any existing program is to establish some mechanism whereby previous known-good reference outputs from representative inputs can be compared to new results. After each change is made, ensure that the results match using whatever criteria apply to the particular algorithm. Some will expect bitwise identical results, which is not always possible, especially where floating-point arithmetic is concerned; see Numerical Accuracy and Precision regarding numerical accuracy. For other algorithms, implementations may be considered correct if they match the reference within some small epsilon.
Note that the process used for validating numerical results can easily be extended to validate performance results as well. We want to ensure that each change we make is correct and that it improves performance (and by how much). Checking these things frequently as an integral part of our cyclical APOD process will help ensure that we achieve the desired results as rapidly as possible.
6.1.2. Unit Testing
A useful counterpart to the reference comparisons described above is to structure the code itself in such a way that is readily verifiable at the unit level. For example, we can write our CUDA kernels as a collection of many short __device__ functions rather than one large monolithic __global__ function; each device function can be tested independently before hooking them all together.
For example, many kernels have complex addressing logic for accessing memory in addition to their actual computation. If we validate our addressing logic separately prior to introducing the bulk of the computation, then this will simplify any later debugging efforts. (Note that the CUDA compiler considers any device code that does not contribute to a write to global memory as dead code subject to elimination, so we must at least write something out to global memory as a result of our addressing logic in order to successfully apply this strategy.)
Going a step further, if most functions are defined as __host____device__ rather than just __device__ functions, then these functions can be tested on both the CPU and the GPU, thereby increasing our confidence that the function is correct and that there will not be any unexpected differences in the results. If there are differences, then those differences will be seen early and can be understood in the context of a simple function.
As a useful side effect, this strategy will allow us a means to reduce code duplication should we wish to include both CPU and GPU execution paths in our application: if the bulk of the work of our CUDA kernels is done in __host____device__ functions, we can easily call those functions from both the host code and the device code without duplication.
6.2. Debugging
CUDA-GDB is a port of the GNU Debugger that runs on Linux and Mac; see: http://developer.nvidia.com/cuda-gdb.
The NVIDIA Parallel Nsight debugging and profiling tool for Microsoft Windows Vista and Windows 7 is available as a free plugin for Microsoft Visual Studio; see: http://developer.nvidia.com/nvidia-parallel-nsight.
Several third-party debuggers now support CUDA debugging as well; see: http://developer.nvidia.com/debugging-solutions for more details.
6.3. Numerical Accuracy and Precision
Incorrect or unexpected results arise principally from issues of floating-point accuracy due to the way floating-point values are computed and stored. The following sections explain the principal items of interest. Other peculiarities of floating-point arithmetic are presented in Features and Technical Specifications of the CUDA C Programming Guide as well as in a whitepaper and accompanying webinar on floating-point precision and performance available from http://developer.nvidia.com/content/precision-performance-floating-point-and-ieee-754-compliance-nvidia-gpus.
6.3.1. Single vs. Double Precision
Devices of compute capability 1.3 and higher provide native support for double-precision floating-point values (that is, values 64 bits wide). Results obtained using double-precision arithmetic will frequently differ from the same operation performed via single-precision arithmetic due to the greater precision of the former and due to rounding issues. Therefore, it is important to be sure to compare values of like precision and to express the results within a certain tolerance rather than expecting them to be exact.
6.3.2. Floating Point Math Is not Associative
Each floating-point arithmetic operation involves a certain amount of rounding. Consequently, the order in which arithmetic operations are performed is important. If A, B, and C are floating-point values, (A+B)+C is not guaranteed to equal A+(B+C) as it is in symbolic math. When you parallelize computations, you potentially change the order of operations and therefore the parallel results might not match sequential results. This limitation is not specific to CUDA, but an inherent part of parallel computation on floating-point values.
6.3.3. Promotions to Doubles and Truncations to Floats
When comparing the results of computations of float variables between the host and device, make sure that promotions to double precision on the host do not account for different numerical results. For example, if the code segment
float a;
...
a = a*1.02;were performed on a device of compute capability 1.2 or less, or on a device with compute capability 1.3 but compiled without enabling double precision (as mentioned above), then the multiplication would be performed in single precision. However, if the code were performed on the host, the literal 1.02 would be interpreted as a double-precision quantity and a would be promoted to a double, the multiplication would be performed in double precision, and the result would be truncated to a float - thereby yielding a slightly different result. If, however, the literal 1.02 were replaced with 1.02f, the result would be the same in all cases because no promotion to doubles would occur. To ensure that computations use single-precision arithmetic, always use float literals.
In addition to accuracy, the conversion between doubles and floats (and vice versa) has a detrimental effect on performance, as discussed in Instruction Optimization.
6.3.4. IEEE 754 Compliance
All CUDA compute devices follow the IEEE 754 standard for binary floating-point representation, with some small exceptions. These exceptions, which are detailed in Features and Technical Specifications of the CUDA C Programming Guide, can lead to results that differ from IEEE 754 values computed on the host system.
One of the key differences is the fused multiply-add (FMA) instruction, which combines multiply-add operations into a single instruction execution. Its result will often differ slightly from results obtained by doing the two operations separately.
6.3.5. x86 80-bit Computations
x86 processors can use an 80-bit double extended precision math when performing floating-point calculations. The results of these calculations can frequently differ from pure 64-bit operations performed on the CUDA device. To get a closer match between values, set the x86 host processor to use regular double or single precision (64 bits and 32 bits, respectively). This is done with the FLDCW x86 assembly instruction or the equivalent operating system API.
7. Optimizing CUDA Applications
After each round of application parallelization is complete, the developer can move to optimizing the implementation to improve performance. Since there are many possible optimizations that can be considered, having a good understanding of the needs of the application can help to make the process as smooth as possible. However, as with APOD as a whole, program optimization is an iterative process (identify an opportunity for optimization, apply and test the optimization, verify the speedup achieved, and repeat), meaning that it is not necessary for a programmer to spend large amounts of time memorizing the bulk of all possible optimization strategies prior to seeing good speedups. Instead, strategies can be applied incrementally as they are learned.
Optimizations can be applied at various levels, from overlapping data transfers with computation all the way down to fine-tuning floating-point operation sequences. The available profiling tools are invaluable for guiding this process, as they can help suggest a next-best course of action for the developer's optimization efforts and provide references into the relevant portions of the optimization section of this guide.
8. Performance Metrics
When attempting to optimize CUDA code, it pays to know how to measure performance accurately and to understand the role that bandwidth plays in performance measurement. This chapter discusses how to correctly measure performance using CPU timers and CUDA events. It then explores how bandwidth affects performance metrics and how to mitigate some of the challenges it poses.
8.1. Timing
CUDA calls and kernel executions can be timed using either CPU or GPU timers. This section examines the functionality, advantages, and pitfalls of both approaches.
8.1.1. Using CPU Timers
Any CPU timer can be used to measure the elapsed time of a CUDA call or kernel execution. The details of various CPU timing approaches are outside the scope of this document, but developers should always be aware of the resolution their timing calls provide.
When using CPU timers, it is critical to remember that many CUDA API functions are asynchronous; that is, they return control back to the calling CPU thread prior to completing their work. All kernel launches are asynchronous, as are memory-copy functions with the Async suffix on their names. Therefore, to accurately measure the elapsed time for a particular call or sequence of CUDA calls, it is necessary to synchronize the CPU thread with the GPU by calling cudaDeviceSynchronize() immediately before starting and stopping the CPU timer. cudaDeviceSynchronize()blocks the calling CPU thread until all CUDA calls previously issued by the thread are completed.
Although it is also possible to synchronize the CPU thread with a particular stream or event on the GPU, these synchronization functions are not suitable for timing code in streams other than the default stream. cudaStreamSynchronize() blocks the CPU thread until all CUDA calls previously issued into the given stream have completed. cudaEventSynchronize() blocks until a given event in a particular stream has been recorded by the GPU. Because the driver may interleave execution of CUDA calls from other non-default streams, calls in other streams may be included in the timing.
Because the default stream, stream 0, exhibits serializing behavior for work on the device (an operation in the default stream can begin only after all preceding calls in any stream have completed; and no subsequent operation in any stream can begin until it finishes), these functions can be used reliably for timing in the default stream.
Be aware that CPU-to-GPU synchronization points such as those mentioned in this section imply a stall in the GPU's processing pipeline and should thus be used sparingly to minimize their performance impact.
8.1.2. Using CUDA GPU Timers
The CUDA event API provides calls that create and destroy events, record events (via timestamp), and convert timestamp differences into a floating-point value in milliseconds. How to time code using CUDA events illustrates their use.
How to time code using CUDA events
cudaEvent_t start, stop; float time; cudaEventCreate(&start); cudaEventCreate(&stop); cudaEventRecord( start, 0 ); kernel<<<grid,threads>>> ( d_odata, d_idata, size_x, size_y, NUM_REPS); cudaEventRecord( stop, 0 ); cudaEventSynchronize( stop ); cudaEventElapsedTime( &time, start, stop ); cudaEventDestroy( start ); cudaEventDestroy( stop );
Here cudaEventRecord() is used to place the start and stop events into the default stream, stream 0. The device will record a timestamp for the event when it reaches that event in the stream. The cudaEventElapsedTime() function returns the time elapsed between the recording of the start and stop events. This value is expressed in milliseconds and has a resolution of approximately half a microsecond. Like the other calls in this listing, their specific operation, parameters, and return values are described in the CUDA Toolkit Reference Manual. Note that the timings are measured on the GPU clock, so the timing resolution is operating-system-independent.
8.2. Bandwidth
Bandwidth - the rate at which data can be transferred - is one of the most important gating factors for performance. Almost all changes to code should be made in the context of how they affect bandwidth. As described in Memory Optimizations of this guide, bandwidth can be dramatically affected by the choice of memory in which data is stored, how the data is laid out and the order in which it is accessed, as well as other factors.
To measure performance accurately, it is useful to calculate theoretical and effective bandwidth. When the latter is much lower than the former, design or implementation details are likely to reduce bandwidth, and it should be the primary goal of subsequent optimization efforts to increase it.
8.2.1. Theoretical Bandwidth Calculation
Theoretical bandwidth can be calculated using hardware specifications available in the product literature. For example, the NVIDIA Tesla M2090 uses GDDR5 (double data rate) RAM with a memory clock rate of 1.85 GHz and a 384-bit-wide memory interface.
Using these data items, the peak theoretical memory bandwidth of the NVIDIA Tesla M2090 is 177.6 GB/s:
In this calculation, the memory clock rate is converted in to Hz, multiplied by the interface width (divided by 8, to convert bits to bytes) and multiplied by 2 due to the double data rate. Finally, this product is divided by 109 to convert the result to GB/s.
8.2.2. Effective Bandwidth Calculation
Effective bandwidth is calculated by timing specific program activities and by knowing how data is accessed by the program. To do so, use this equation:
Here, the effective bandwidth is in units of GB/s, Br is the number of bytes read per kernel, Bw is the number of bytes written per kernel, and time is given in seconds.
For example, to compute the effective bandwidth of a 2048 x 2048 matrix copy, the following formula could be used:
The number of elements is multiplied by the size of each element (4 bytes for a float), multiplied by 2 (because of the read and write), divided by 109 (or 1,0243) to obtain GB of memory transferred. This number is divided by the time in seconds to obtain GB/s.
8.2.3. Throughput Reported by Visual Profiler
For devices with compute capability of 2.0 or greater, the Visual Profiler can be used to collect several different memory throughput measures. The following throughput metrics can be displayed in the Details or Detail Graphs view:
- Requested Global Load Throughput
- Requested Global Store Throughput
- Global Load Throughput
- Global Store Throughput
- DRAM Read Throughput
- DRAM Write Throughput
The Requested Global Load Throughput and Requested Global Store Throughput values indicate the global memory throughput requested by the kernel and therefore correspond to the effective bandwidth obtained by the calculation shown under Effective Bandwidth Calculation.
Because the minimum memory transaction size is larger than most word sizes, the actual memory throughput required for a kernel can include the transfer of data not used by the kernel. For global memory accesses, this actual throughput is reported by the Global Load Throughput and Global Store Throughput values.
It's important to note that both numbers are useful. The actual memory throughput shows how close the code is to the hardware limit, and a comparison of the effective or requested bandwidth to the actual bandwidth presents a good estimate of how much bandwidth is wasted by suboptimal coalescing of memory accesses (see Coalesced Access to Global Memory). For global memory accesses, this comparison of requested memory bandwidth to actual memory bandwidth is reported by the Global Memory Load Efficiency and Global Memory Store Efficiency metrics.
9. Memory Optimizations
Memory optimizations are the most important area for performance. The goal is to maximize the use of the hardware by maximizing bandwidth. Bandwidth is best served by using as much fast memory and as little slow-access memory as possible. This chapter discusses the various kinds of memory on the host and device and how best to set up data items to use the memory effectively.
9.1. Data Transfer Between Host and Device
The peak theoretical bandwidth between the device memory and the GPU is much higher (177.6 GB/s on the NVIDIA Tesla M2090, for example) than the peak theoretical bandwidth between host memory and device memory (8 GB/s on the PCIe x16 Gen2). Hence, for best overall application performance, it is important to minimize data transfer between the host and the device, even if that means running kernels on the GPU that do not demonstrate any speedup compared with running them on the host CPU.
Intermediate data structures should be created in device memory, operated on by the device, and destroyed without ever being mapped by the host or copied to host memory.
Also, because of the overhead associated with each transfer, batching many small transfers into one larger transfer performs significantly better than making each transfer separately, even if doing so requires packing non-contiguous regions of memory into a contiguous buffer and then unpacking after the transfer.
Finally, higher bandwidth between the host and the device is achieved when using page-locked (or pinned) memory, as discussed in the CUDA C Programming Guide and the Pinned Memory section of this document.
9.1.1. Pinned Memory
Page-locked or pinned memory transfers attain the highest bandwidth between the host and the device. On PCIe x16 Gen2 cards, for example, pinned memory can attain roughly 6GB/s transfer rates.
Pinned memory is allocated using the cudaHostAlloc() functions in the Runtime API. The bandwidthTest CUDA Sample shows how to use these functions as well as how to measure memory transfer performance.
For regions of system memory that have already been pre-allocated, cudaHostRegister() can be used to pin the memory on-the-fly without the need to allocate a separate buffer and copy the data into it.
Pinned memory should not be overused. Excessive use can reduce overall system performance because pinned memory is a scarce resource, but how much is too much is difficult to know in advance. Furthermore, the pinning of system memory is a heavyweight operation compared to most normal system memory allocations, so as with all optimizations, test the application and the systems it runs on for optimal performance parameters.
9.1.2. Asynchronous and Overlapping Transfers with Computation
Data transfers between the host and the device using cudaMemcpy() are blocking transfers; that is, control is returned to the host thread only after the data transfer is complete. The cudaMemcpyAsync() function is a non-blocking variant of cudaMemcpy() in which control is returned immediately to the host thread. In contrast with cudaMemcpy(), the asynchronous transfer version requires pinned host memory (see Pinned Memory), and it contains an additional argument, a stream ID. A stream is simply a sequence of operations that are performed in order on the device. Operations in different streams can be interleaved and in some cases overlapped - a property that can be used to hide data transfers between the host and the device.
Asynchronous transfers enable overlap of data transfers with computation in two different ways. On all CUDA-enabled devices, it is possible to overlap host computation with asynchronous data transfers and with device computations. For example, Overlapping computation and data transfers demonstrates how host computation in the routine cpuFunction() is performed while data is transferred to the device and a kernel using the device is executed.
Overlapping computation and data transfers
cudaMemcpyAsync(a_d, a_h, size, cudaMemcpyHostToDevice, 0); kernel<<<grid, block>>>(a_d); cpuFunction();
The last argument to the cudaMemcpyAsync() function is the stream ID, which in this case uses the default stream, stream 0. The kernel also uses the default stream, and it will not begin execution until the memory copy completes; therefore, no explicit synchronization is needed. Because the memory copy and the kernel both return control to the host immediately, the host function cpuFunction() overlaps their execution.
In Overlapping computation and data transfers, the memory copy and kernel execution occur sequentially. On devices that are capable of concurrent copy and compute, it is possible to overlap kernel execution on the device with data transfers between the host and the device. Whether a device has this capability is indicated by the asyncEngineCount field of the cudaDeviceProp structure (or listed in the output of the deviceQuery CUDA Sample). On devices that have this capability, the overlap once again requires pinned host memory, and, in addition, the data transfer and kernel must use different, non-default streams (streams with non-zero stream IDs). Non-default streams are required for this overlap because memory copy, memory set functions, and kernel calls that use the default stream begin only after all preceding calls on the device (in any stream) have completed, and no operation on the device (in any stream) commences until they are finished.
Concurrent copy and execute illustrates the basic technique.
Concurrent copy and execute
cudaStreamCreate(&stream1); cudaStreamCreate(&stream2); cudaMemcpyAsync(a_d, a_h, size, cudaMemcpyHostToDevice, stream1); kernel<<<grid, block, 0, stream2>>>(otherData_d);
In this code, two streams are created and used in the data transfer and kernel executions as specified in the last arguments of the cudaMemcpyAsync call and the kernel's execution configuration.
Concurrent copy and execute demonstrates how to overlap kernel execution with asynchronous data transfer. This technique could be used when the data dependency is such that the data can be broken into chunks and transferred in multiple stages, launching multiple kernels to operate on each chunk as it arrives. Sequential copy and execute and Staged concurrent copy and execute demonstrate this. They produce equivalent results. The first segment shows the reference sequential implementation, which transfers and operates on an array of N floats (where N is assumed to be evenly divisible by nThreads).
Sequential copy and execute
cudaMemcpy(a_d, a_h, N*sizeof(float), dir); kernel<<<N/nThreads, nThreads>>>(a_d);
Staged concurrent copy and execute shows how the transfer and kernel execution can be broken up into nStreams stages. This approach permits some overlapping of the data transfer and execution.
Staged concurrent copy and execute
size=N*sizeof(float)/nStreams; for (i=0; i<nStreams; i++) { offset = i*N/nStreams; cudaMemcpyAsync(a_d+offset, a_h+offset, size, dir, stream[i]); kernel<<<N/(nThreads*nStreams), nThreads, 0, stream[i]>>>(a_d+offset); }
(In Staged concurrent copy and execute, it is assumed that N is evenly divisible by nThreads*nStreams.) Because execution within a stream occurs sequentially, none of the kernels will launch until the data transfers in their respective streams complete. Current GPUs can simultaneously process asynchronous data transfers and execute kernels. GPUs with a single copy engine can perform one asynchronous data transfer and execute kernels whereas GPUs with two copy engines can simultaneously perform one asynchronous data transfer from the host to the device, one asynchronous data transfer from the device to the host, and execute kernels. The number of copy engines on a GPU is given by the asyncEngineCount field of the cudaDeviceProp structure, which is also listed in the output of the deviceQuery CUDA Sample. (It should be mentioned that it is not possible to overlap a blocking transfer with an asynchronous transfer, because the blocking transfer occurs in the default stream, so it will not begin until all previous CUDA calls complete. It will not allow any other CUDA call to begin until it has completed.) A diagram depicting the timeline of execution for the two code segments is shown in Figure 1, and nStreams is equal to 4 for Staged concurrent copy and execute in the bottom half of the figure.
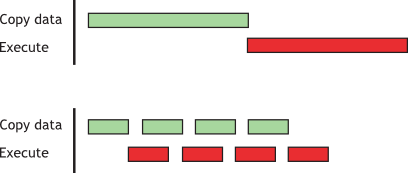
For this example, it is assumed that the data transfer and kernel execution times are comparable. In such cases, and when the execution time (tE) exceeds the transfer time (tT), a rough estimate for the overall time is tE + tT/nStreams for the staged version versus tE + tT for the sequential version. If the transfer time exceeds the execution time, a rough estimate for the overall time is tT + tE/nStreams.
9.1.3. Zero Copy
Zero copy is a feature that was added in version 2.2 of the CUDA Toolkit. It enables GPU threads to directly access host memory. For this purpose, it requires mapped pinned (non-pageable) memory. On integrated GPUs (i.e., GPUs with the integrated field of the CUDA device properties structure set to 1), mapped pinned memory is always a performance gain because it avoids superfluous copies as integrated GPU and CPU memory are physically the same. On discrete GPUs, mapped pinned memory is advantageous only in certain cases. Because the data is not cached on the GPU, mapped pinned memory should be read or written only once, and the global loads and stores that read and write the memory should be coalesced. Zero copy can be used in place of streams because kernel-originated data transfers automatically overlap kernel execution without the overhead of setting up and determining the optimal number of streams.
The host code in Zero-copy host code shows how zero copy is typically set up.
Zero-copy host code
float *a_h, *a_map; ... cudaGetDeviceProperties(&prop, 0); if (!prop.canMapHostMemory) exit(0); cudaSetDeviceFlags(cudaDeviceMapHost); cudaHostAlloc(&a_h, nBytes, cudaHostAllocMapped); cudaHostGetDevicePointer(&a_map, a_h, 0); kernel<<<gridSize, blockSize>>>(a_map);
In this code, the canMapHostMemory field of the structure returned by cudaGetDeviceProperties() is used to check that the device supports mapping host memory to the device's address space. Page-locked memory mapping is enabled by calling cudaSetDeviceFlags() with cudaDeviceMapHost. Note that cudaSetDeviceFlags() must be called prior to setting a device or making a CUDA call that requires state (that is, essentially, before a context is created). Page-locked mapped host memory is allocated using cudaHostAlloc(), and the pointer to the mapped device address space is obtained via the function cudaHostGetDevicePointer(). In the code in Zero-copy host code, kernel() can reference the mapped pinned host memory using the pointer a_map in exactly the same was as it would if a_map referred to a location in device memory.
9.1.4. Unified Virtual Addressing
Devices of compute capability 2.0 and later support a special addressing mode called Unified Virtual Addressing (UVA) on 64-bit Linux, Mac OS, and Windows XP and on Windows Vista/7 when using TCC driver mode. With UVA, the host memory and the device memories of all installed supported devices share a single virtual address space.
Prior to UVA, an application had to keep track of which pointers referred to device memory (and for which device) and which referred to host memory as a separate bit of metadata (or as hard-coded information in the program) for each pointer. Using UVA, on the other hand, the physical memory space to which a pointer points can be determined simply by inspecting the value of the pointer using cudaPointerGetAttributes().
Under UVA, pinned host memory allocated with cudaHostAlloc() will have identical host and device pointers, so it is not necessary to call cudaHostGetDevicePointer() for such allocations. Host memory allocations pinned after-the-fact via cudaHostRegister(), however, will continue to have different device pointers than their host pointers, so cudaHostGetDevicePointer() remains necessary in that case.
UVA is also a necessary precondition for enabling peer-to-peer (P2P) transfer of data directly across the PCIe bus for supported GPUs in supported configurations, bypassing host memory.
See the CUDA C Programming Guide for further explanations and software requirements for UVA and P2P.
9.2. Device Memory Spaces
CUDA devices use several memory spaces, which have different characteristics that reflect their distinct usages in CUDA applications. These memory spaces include global, local, shared, texture, and registers, as shown in Figure 2.
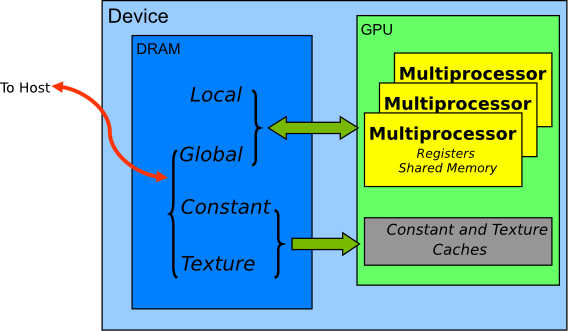
Of these different memory spaces, global memory is the most plentiful; see Features and Technical Specifications of the CUDA C Programming Guide for the amounts of memory available in each memory space at each compute capability level. Global, local, and texture memory have the greatest access latency, followed by constant memory, shared memory, and the register file.
The various principal traits of the memory types are shown in Table 1.
| Memory | Location on/off chip | Cached | Access | Scope | Lifetime |
|---|---|---|---|---|---|
| Register | On | n/a | R/W | 1 thread | Thread |
| Local | Off | Yes†† | R/W | 1 thread | Thread |
| Shared | On | n/a | R/W | All threads in block | Block |
| Global | Off | † | R/W | All threads + host | Host allocation |
| Constant | Off | Yes | R | All threads + host | Host allocation |
| Texture | Off | Yes | R | All threads + host | Host allocation |
| † Cached in L1 and L2 by default on devices of compute capability 2.x; cached only in L2 by default on devices of higher compute capabilities, though some allow opt-in to caching in L1 as well via compilation flags. | |||||
| †† Cached in L1 and L2 by default on devices of compute capability 2.x and 3.x; devices of compute capability 5.x cache locals only in L2. | |||||
In the case of texture access, if a texture reference is bound to a linear array in global memory, then the device code can write to the underlying array. Texture references that are bound to CUDA arrays can be written to via surface-write operations by binding a surface to the same underlying CUDA array storage). Reading from a texture while writing to its underlying global memory array in the same kernel launch should be avoided because the texture caches are read-only and are not invalidated when the associated global memory is modified.
9.2.1. Coalesced Access to Global Memory
Perhaps the single most important performance consideration in programming for CUDA-capable GPU architectures is the coalescing of global memory accesses. Global memory loads and stores by threads of a warp are coalesced by the device into as few as one transaction when certain access requirements are met.
The access requirements for coalescing depend on the compute capability of the device and are documented in the CUDA C Programming Guide.
For devices of compute capability 2.x, the requirements can be summarized quite easily: the concurrent accesses of the threads of a warp will coalesce into a number of transactions equal to the number of cache lines necessary to service all of the threads of the warp. By default, all accesses are cached through L1, which as 128-byte lines. For scattered access patterns, to reduce overfetch, it can sometimes be useful to cache only in L2, which caches shorter 32-byte segments (see the CUDA C Programming Guide).
For devices of compute capability 3.x, accesses to global memory are cached only in L2; L1 is reserved for local memory accesses. Some devices of compute capability 3.5, 3.7, or 5.2 allow opt-in caching of globals in L1 as well.
Accessing memory in a coalesced way is even more important when ECC is turned on. Scattered accesses increase ECC memory transfer overhead, especially when writing data to the global memory.
Coalescing concepts are illustrated in the following simple examples. These examples assume compute capability 2.x. These examples assume that accesses are cached through L1, which is the default behavior on those devices, and that accesses are for 4-byte words, unless otherwise noted.
9.2.1.1. A Simple Access Pattern
The first and simplest case of coalescing can be achieved by any CUDA-enabled device: the k-th thread accesses the k-th word in a cache line. Not all threads need to participate.
For example, if the threads of a warp access adjacent 4-byte words (e.g., adjacent float values), a single 128B L1 cache line and therefore a single coalesced transaction will service that memory access. Such a pattern is shown in Figure 3.
This access pattern results in a single 128-byte L1 transaction, indicated by the red rectangle.
If some words of the line had not been requested by any thread (such as if several threads had accessed the same word or if some threads did not participate in the access), all data in the cache line is fetched anyway. Furthermore, if accesses by the threads of the warp had been permuted within this segment, still only one 128-byte L1 transaction would have been performed by a device with compute capability 2.x.
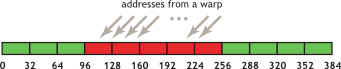
9.2.1.2. A Sequential but Misaligned Access Pattern
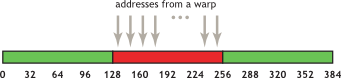
If sequential threads in a warp access memory that is sequential but not aligned with the cache lines, two 128-byte L1 cache will be requested, as shown in Figure 4.

For non-caching transactions (i.e., those that bypass L1 and use only the L2 cache), a similar effect is seen, except at the level of the 32-byte L2 segments. In Figure 5, we see an example of this: the same access pattern from Figure 4 is used, but now L1 caching is disabled, so now five 32-byte L2 segments are needed to satisfy the request.
Memory allocated through the CUDA Runtime API, such as via cudaMalloc(), is guaranteed to be aligned to at least 256 bytes. Therefore, choosing sensible thread block sizes, such as multiples of the warp size (i.e., 32 on current GPUs), facilitates memory accesses by warps that are aligned to cache lines. (Consider what would happen to the memory addresses accessed by the second, third, and subsequent thread blocks if the thread block size was not a multiple of warp size, for example.)
9.2.1.3. Effects of Misaligned Accesses
It is easy and informative to explore the ramifications of misaligned accesses using a simple copy kernel, such as the one in A copy kernel that illustrates misaligned accesses.
A copy kernel that illustrates misaligned accesses
__global__ void offsetCopy(float *odata, float* idata, int offset) { int xid = blockIdx.x * blockDim.x + threadIdx.x + offset; odata[xid] = idata[xid]; }
In A copy kernel that illustrates misaligned accesses, data is copied from the input array idata to the output array, both of which exist in global memory. The kernel is executed within a loop in host code that varies the parameter offset from 0 to 32. (Figure 4 and Figure 4 correspond to misalignments in the cases of caching and non-caching memory accesses, respectively.) The effective bandwidth for the copy with various offsets on an NVIDIA Tesla M2090 (compute capability 2.0, with ECC turned on, as it is by default) is shown in Figure 6.
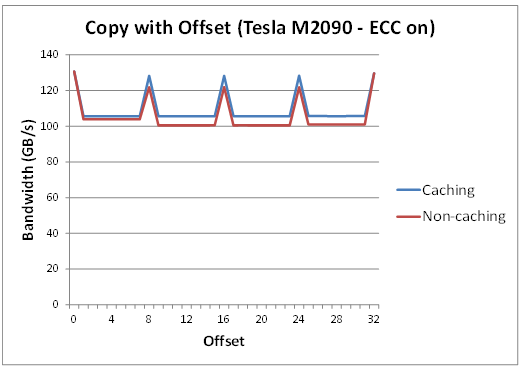
For the NVIDIA Tesla M2090, global memory accesses with no offset or with offsets that are multiples of 32 words result in a single L1 cache line transaction or 4 L2 cache segment loads (for non-L1-caching loads). The achieved bandwidth is approximately 130GB/s. Otherwise, either two L1 cache lines (caching mode) or four to five L2 cache segments (non-caching mode) are loaded per warp, resulting in approximately 4/5th of the memory throughput achieved with no offsets.
An interesting point is that we might expect the caching case to perform worse than the non-caching case for this sample, given that each warp in the caching case fetches twice as many bytes as it requires, whereas in the non-caching case, only 5/4 as many bytes as required are fetched per warp. In this particular example, that effect is not apparent, however, because adjacent warps reuse the cache lines their neighbors fetched. So while the impact is still evident in the case of caching loads, it is not as great as we might have expected. It would have been more so if adjacent warps had not exhibited such a high degree of reuse of the over-fetched cache lines.
9.2.1.4. Strided Accesses
As seen above, in the case of misaligned sequential accesses, the caches of compute capability 2.x devices help a lot to achieve reasonable performance. It may be different with non-unit-strided accesses, however, and this is a pattern that occurs frequently when dealing with multidimensional data or matrices. For this reason, ensuring that as much as possible of the data in each cache line fetched is actually used is an important part of performance optimization of memory accesses on these devices.
To illustrate the effect of strided access on effective bandwidth, see the kernel strideCopy() in A kernel to illustrate non-unit stride data copy, which copies data with a stride of stride elements between threads from idata to odata.
A kernel to illustrate non-unit stride data copy
__global__ void strideCopy(float *odata, float* idata, int stride) { int xid = (blockIdx.x*blockDim.x + threadIdx.x)*stride; odata[xid] = idata[xid]; }
Figure 7 illustrates such a situation; in this case, threads within a warp access words in memory with a stride of 2. This action leads to a load of two L1 cache lines (or eight L2 cache segments in non-caching mode) per warp on the Tesla M2090 (compute capability 2.0).
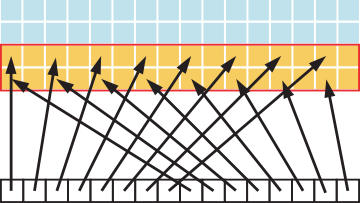
A stride of 2 results in a 50% of load/store efficiency since half the elements in the transaction are not used and represent wasted bandwidth. As the stride increases, the effective bandwidth decreases until the point where 32 lines of cache are loaded for the 32 threads in a warp, as indicated in Figure 8.
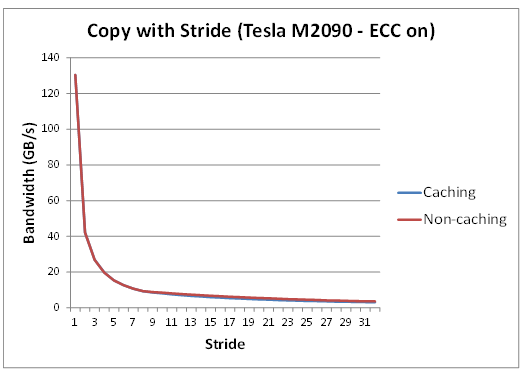
As illustrated in Figure 8, non-unit-stride global memory accesses should be avoided whenever possible. One method for doing so utilizes shared memory, which is discussed in the next section.
9.2.2. Shared Memory
Because it is on-chip, shared memory has much higher bandwidth and lower latency than local and global memory - provided there are no bank conflicts between the threads, as detailed in the following section.
9.2.2.2. Shared Memory in Matrix Multiplication (C=AB)
Shared memory enables cooperation between threads in a block. When multiple threads in a block use the same data from global memory, shared memory can be used to access the data from global memory only once. Shared memory can also be used to avoid uncoalesced memory accesses by loading and storing data in a coalesced pattern from global memory and then reordering it in shared memory. Aside from memory bank conflicts, there is no penalty for non-sequential or unaligned accesses by a warp in shared memory.
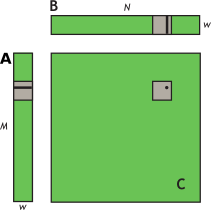
The use of shared memory is illustrated via the simple example of a matrix multiplication C = AB for the case with A of dimension Mxw, B of dimension wxN, and C of dimension MxN. To keep the kernels simple, M and N are multiples of 32, and w is 32 for devices of compute capability 2.0 or higher.
A natural decomposition of the problem is to use a block and tile size of wxw threads. Therefore, in terms of wxw tiles, A is a column matrix, B is a row matrix, and C is their outer product; see Figure 9. A grid of N/w by M/w blocks is launched, where each thread block calculates the elements of a different tile in C from a single tile of A and a single tile of B.
To do this, the simpleMultiply kernel (Unoptimized matrix multiplication) calculates the output elements of a tile of matrix C.
In Unoptimized matrix multiplication, a, b, and c are pointers to global memory for the matrices A, B, and C, respectively; blockDim.x, blockDim.y, and TILE_DIM are all equal to w. Each thread in the wxw-thread block calculates one element in a tile of C. row and col are the row and column of the element in C being calculated by a particular thread. The for loop over i multiplies a row of A by a column of B, which is then written to C.
The effective bandwidth of this kernel is only 6.6GB/s on an NVIDIA Tesla K20X (with ECC off). To analyze performance, it is necessary to consider how warps access global memory in the for loop. Each warp of threads calculates one row of a tile of C, which depends on a single row of A and an entire tile of B as illustrated in Figure 10.
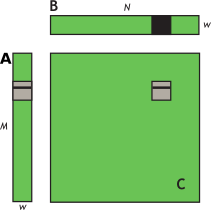
For each iteration i of the for loop, the threads in a warp read a row of the B tile, which is a sequential and coalesced access for all compute capabilities.
However, for each iteration i, all threads in a warp read the same value from global memory for matrix A, as the index row*TILE_DIM+i is constant within a warp. Even though such an access requires only 1 transaction on devices of compute capability 2.0 or higher, there is wasted bandwidth in the transaction, because only one 4-byte word out of 32 words in the cache line is used. We can reuse this cache line in subsequent iterations of the loop, and we would eventually utilize all 32 words; however, when many warps execute on the same multiprocessor simultaneously, as is generally the case, the cache line may easily be evicted from the cache between iterations i and i+1.
The performance on a device of any compute capability can be improved by reading a tile of A into shared memory as shown in Using shared memory to improve the global memory load efficiency in matrix multiplication.
In Using shared memory to improve the global memory load efficiency in matrix multiplication, each element in a tile of A is read from global memory only once, in a fully coalesced fashion (with no wasted bandwidth), to shared memory. Within each iteration of the for loop, a value in shared memory is broadcast to all threads in a warp. No __syncthreads()synchronization barrier call is needed after reading the tile of A into shared memory because only threads within the warp that write the data into shared memory read the data (Note: in lieu of __syncthreads(), the __shared__ array may need to be marked as volatile for correctness on devices of compute capability 2.0 or higher; see the NVIDIA Fermi Compatibility Guide). This kernel has an effective bandwidth of 7.8GB/s on an NVIDIA Tesla K20X. This illustrates the use of the shared memory as a user-managed cache when the hardware L1 cache eviction policy does not match up well with the needs of the application or when L1 cache is not used for reads from global memory.
A further improvement can be made to how Using shared memory to improve the global memory load efficiency in matrix multiplication deals with matrix B. In calculating each of the rows of a tile of matrix C, the entire tile of B is read. The repeated reading of the B tile can be eliminated by reading it into shared memory once (Improvement by reading additional data into shared memory).
Note that in Improvement by reading additional data into shared memory, a __syncthreads() call is required after reading the B tile because a warp reads data from shared memory that were written to shared memory by different warps. The effective bandwidth of this routine is 14.9 GB/s on an NVIDIA Tesla K20X. Note that the performance improvement is not due to improved coalescing in either case, but to avoiding redundant transfers from global memory.
The results of the various optimizations are summarized in Table 2.
| Optimization | NVIDIA Tesla K20X |
|---|---|
| No optimization | 6.6 GB/s |
| Coalesced using shared memory to store a tile of A | 7.8 GB/s |
| Using shared memory to eliminate redundant reads of a tile of B | 14.9 GB/s |
9.2.3. Local Memory
Local memory is so named because its scope is local to the thread, not because of its physical location. In fact, local memory is off-chip. Hence, access to local memory is as expensive as access to global memory. In other words, the term local in the name does not imply faster access.
Local memory is used only to hold automatic variables. This is done by the nvcc compiler when it determines that there is insufficient register space to hold the variable. Automatic variables that are likely to be placed in local memory are large structures or arrays that would consume too much register space and arrays that the compiler determines may be indexed dynamically.
Inspection of the PTX assembly code (obtained by compiling with -ptx or -keep command-line options to nvcc) reveals whether a variable has been placed in local memory during the first compilation phases. If it has, it will be declared using the .local mnemonic and accessed using the ld.local and st.local mnemonics. If it has not, subsequent compilation phases might still decide otherwise, if they find the variable consumes too much register space for the targeted architecture. There is no way to check this for a specific variable, but the compiler reports total local memory usage per kernel (lmem) when run with the --ptxas-options=-v option.
9.2.4. Texture Memory
The read-only texture memory space is cached. Therefore, a texture fetch costs one device memory read only on a cache miss; otherwise, it just costs one read from the texture cache. The texture cache is optimized for 2D spatial locality, so threads of the same warp that read texture addresses that are close together will achieve best performance. Texture memory is also designed for streaming fetches with a constant latency; that is, a cache hit reduces DRAM bandwidth demand, but not fetch latency.
In certain addressing situations, reading device memory through texture fetching can be an advantageous alternative to reading device memory from global or constant memory.
9.2.4.1. Additional Texture Capabilities
If textures are fetched using tex1D(), tex2D(), or tex3D() rather than tex1Dfetch(), the hardware provides other capabilities that might be useful for some applications such as image processing, as shown in Table 4.
| Feature | Use | Caveat |
|---|---|---|
| Filtering | Fast, low-precision interpolation between texels | Valid only if the texture reference returns floating-point data |
| Normalized texture coordinates | Resolution-independent coding | None |
| Addressing modes | Automatic handling of boundary cases1 | Can be used only with normalized texture coordinates |
| 1 The automatic handling of boundary cases in the bottom row of Table 4 refers to how a texture coordinate is resolved when it falls outside the valid addressing range. There are two options: clamp and wrap. If x is the coordinate and N is the number of texels for a one-dimensional texture, then with clamp, x is replaced by 0 if x < 0 and by 1-1/N if 1 <x. With wrap, x is replaced by frac(x) where frac(x) = x - floor(x). Floor returns the largest integer less than or equal to x. So, in clamp mode where N = 1, an x of 1.3 is clamped to 1.0; whereas in wrap mode, it is converted to 0.3 | ||
Within a kernel call, the texture cache is not kept coherent with respect to global memory writes, so texture fetches from addresses that have been written via global stores in the same kernel call return undefined data. That is, a thread can safely read a memory location via texture if the location has been updated by a previous kernel call or memory copy, but not if it has been previously updated by the same thread or another thread within the same kernel call.
9.2.5. Constant Memory
There is a total of 64 KB constant memory on a device. The constant memory space is cached. As a result, a read from constant memory costs one memory read from device memory only on a cache miss; otherwise, it just costs one read from the constant cache. Accesses to different addresses by threads within a warp are serialized, thus the cost scales linearly with the number of unique addresses read by all threads within a warp. As such, the constant cache is best when threads in the same warp accesses only a few distinct locations. If all threads of a warp access the same location, then constant memory can be as fast as a register access.
9.2.6. Registers
Generally, accessing a register consumes zero extra clock cycles per instruction, but delays may occur due to register read-after-write dependencies and register memory bank conflicts.
The latency of read-after-write dependencies is approximately 24 cycles, but this latency is completely hidden on multiprocessors that have sufficient warps of threads concurrent per multiprocessor. For devices of compute capability 2.0, which have 32 CUDA cores per multiprocessor, as many as 768 threads (24 warps) might be required to completely hide latency, and so on for devices of higher compute capabilities.
The compiler and hardware thread scheduler will schedule instructions as optimally as possible to avoid register memory bank conflicts. They achieve the best results when the number of threads per block is a multiple of 64. Other than following this rule, an application has no direct control over these bank conflicts. In particular, there is no register-related reason to pack data into float4 or int4 types.
9.2.6.1. Register Pressure
Register pressure occurs when there are not enough registers available for a given task. Even though each multiprocessor contains thousands of 32-bit registers (see Features and Technical Specifications of the CUDA C Programming Guide), these are partitioned among concurrent threads. To prevent the compiler from allocating too many registers, use the -maxrregcount=N compiler command-line option (see nvcc) or the launch bounds kernel definition qualifier (see Execution Configuration of the CUDA C Programming Guide) to control the maximum number of registers to allocated per thread.
9.3. Allocation
Device memory allocation and de-allocation via cudaMalloc() and cudaFree() are expensive operations, so device memory should be reused and/or sub-allocated by the application wherever possible to minimize the impact of allocations on overall performance.
10. Execution Configuration Optimizations
One of the keys to good performance is to keep the multiprocessors on the device as busy as possible. A device in which work is poorly balanced across the multiprocessors will deliver suboptimal performance. Hence, it's important to design your application to use threads and blocks in a way that maximizes hardware utilization and to limit practices that impede the free distribution of work. A key concept in this effort is occupancy, which is explained in the following sections.
Hardware utilization can also be improved in some cases by designing your application so that multiple, independent kernels can execute at the same time. Multiple kernels executing at the same time is known as concurrent kernel execution. Concurrent kernel execution is described below.
Another important concept is the management of system resources allocated for a particular task. How to manage this resource utilization is discussed in the final sections of this chapter.
10.1. Occupancy
Thread instructions are executed sequentially in CUDA, and, as a result, executing other warps when one warp is paused or stalled is the only way to hide latencies and keep the hardware busy. Some metric related to the number of active warps on a multiprocessor is therefore important in determining how effectively the hardware is kept busy. This metric is occupancy.
Occupancy is the ratio of the number of active warps per multiprocessor to the maximum number of possible active warps. (To determine the latter number, see the deviceQuery CUDA Sample or refer to Compute Capabilities in the CUDA C Programming Guide.) Another way to view occupancy is the percentage of the hardware's ability to process warps that is actively in use.
Higher occupancy does not always equate to higher performance-there is a point above which additional occupancy does not improve performance. However, low occupancy always interferes with the ability to hide memory latency, resulting in performance degradation.
10.1.1. Calculating Occupancy
One of several factors that determine occupancy is register availability. Register storage enables threads to keep local variables nearby for low-latency access. However, the set of registers (known as the register file) is a limited commodity that all threads resident on a multiprocessor must share. Registers are allocated to an entire block all at once. So, if each thread block uses many registers, the number of thread blocks that can be resident on a multiprocessor is reduced, thereby lowering the occupancy of the multiprocessor. The maximum number of registers per thread can be set manually at compilation time per-file using the -maxrregcount option or per-kernel using the __launch_bounds__ qualifier (see Register Pressure).
For purposes of calculating occupancy, the number of registers used by each thread is one of the key factors. For example, devices with compute capability 1.1 have 8,192 32-bit registers per multiprocessor and can have a maximum of 768 simultaneous threads resident (24 warps x 32 threads per warp). This means that in one of these devices, for a multiprocessor to have 100% occupancy, each thread can use at most 10 registers. However, this approach of determining how register count affects occupancy does not take into account the register allocation granularity. For example, on a device of compute capability 1.1, a kernel with 128-thread blocks using 12 registers per thread results in an occupancy of 83% with 5 active 128-thread blocks per multi-processor, whereas a kernel with 256-thread blocks using the same 12 registers per thread results in an occupancy of 66% because only two 256-thread blocks can reside on a multiprocessor. Furthermore, register allocations are rounded up to the nearest 256 registers per block on devices with compute capability 1.1.
The number of registers available, the maximum number of simultaneous threads resident on each multiprocessor, and the register allocation granularity vary over different compute capabilities. Because of these nuances in register allocation and the fact that a multiprocessor's shared memory is also partitioned between resident thread blocks, the exact relationship between register usage and occupancy can be difficult to determine. The --ptxas options=v option of nvcc details the number of registers used per thread for each kernel. See Hardware Multithreading of the CUDA C Programming Guide for the register allocation formulas for devices of various compute capabilities and Features and Technical Specifications of the CUDA C Programming Guide for the total number of registers available on those devices. Alternatively, NVIDIA provides an occupancy calculator in the form of an Excel spreadsheet that enables developers to hone in on the optimal balance and to test different possible scenarios more easily. This spreadsheet, shown in Figure 11, is called CUDA_Occupancy_Calculator.xls and is located in the tools subdirectory of the CUDA Toolkit installation.
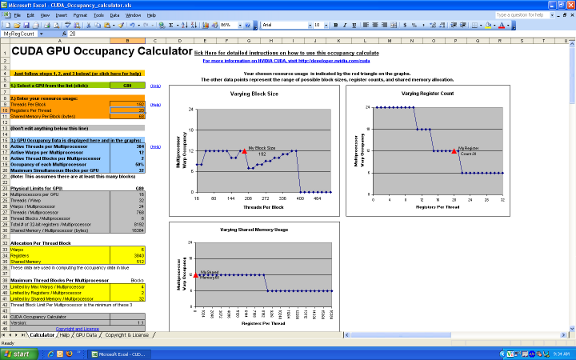
In addition to the calculator spreadsheet, occupancy can be determined using the NVIDIA Visual Profiler's Achieved Occupancy metric. The Visual Profiler also calculates occupancy as part of the Multiprocessor stage of application analysis.
10.2. Concurrent Kernel Execution
As described in Asynchronous and Overlapping Transfers with Computation, CUDA streams can be used to overlap kernel execution with data transfers. On devices that are capable of concurrent kernel execution, streams can also be used to execute multiple kernels simultaneously to more fully take advantage of the device's multiprocessors. Whether a device has this capability is indicated by the concurrentKernels field of the cudaDeviceProp structure (or listed in the output of the deviceQuery CUDA Sample). Non-default streams (streams other than stream 0) are required for concurrent execution because kernel calls that use the default stream begin only after all preceding calls on the device (in any stream) have completed, and no operation on the device (in any stream) commences until they are finished.
The following example illustrates the basic technique. Because kernel1 and kernel2 are executed in different, non-default streams, a capable device can execute the kernels at the same time.
cudaStreamCreate(&stream1); cudaStreamCreate(&stream2); kernel1<<<grid, block, 0, stream1>>>(data_1); kernel2<<<grid, block, 0, stream2>>>(data_2);
10.3. Multiple contexts
CUDA work occurs within a process space for a particular GPU known as a context. The context encapsulates kernel launches and memory allocations for that GPU as well as supporting constructs such as the page tables. The context is explicit in the CUDA Driver API but is entirely implicit in the CUDA Runtime API, which creates and manages contexts automatically.
With the CUDA Driver API, a CUDA application process can potentially create more than one context for a given GPU. If multiple CUDA application processes access the same GPU concurrently, this almost always implies multiple contexts, since a context is tied to a particular host process unless CUDA Multi-Process Service is in use.
While multiple contexts (and their associated resources such as global memory allocations) can be allocated concurrently on a given GPU, only one of these contexts can execute work at any given moment on that GPU; contexts sharing the same GPU are time-sliced. Creating additional contexts incurs memory overhead for per-context data and time overhead for context switching. Furthermore, the need for context switching can reduce utilization when work from several contexts could otherwise execute concurrently (see also Concurrent Kernel Execution).
Therefore, it is best to avoid multiple contexts per GPU within the same CUDA application. To assist with this, the CUDA Driver API provides methods to access and manage a special context on each GPU called the primary context. These are the same contexts used implicitly by the CUDA Runtime when there is not already a current context for a thread.
// When initializing the program/library CUcontext ctx; cuDevicePrimaryCtxRetain(&ctx, dev); // When the program/library launches work cuCtxPushCurrent(ctx); kernel<<<...>>>(...); cuCtxPopCurrent(&ctx); // When the program/library is finished with the context cuDevicePrimaryCtxRelease(dev);
10.4. Hiding Register Dependencies
Register dependencies arise when an instruction uses a result stored in a register written by an instruction before it. The latency on current CUDA-enabled GPUs is approximately 24 cycles, so threads must wait 24 cycles before using an arithmetic result. However, this latency can be completely hidden by the execution of threads in other warps. See Registers for details.
10.5. Thread and Block Heuristics
The dimension and size of blocks per grid and the dimension and size of threads per block are both important factors. The multidimensional aspect of these parameters allows easier mapping of multidimensional problems to CUDA and does not play a role in performance. As a result, this section discusses size but not dimension.
Latency hiding and occupancy depend on the number of active warps per multiprocessor, which is implicitly determined by the execution parameters along with resource (register and shared memory) constraints. Choosing execution parameters is a matter of striking a balance between latency hiding (occupancy) and resource utilization.
Choosing the execution configuration parameters should be done in tandem; however, there are certain heuristics that apply to each parameter individually. When choosing the first execution configuration parameter-the number of blocks per grid, or grid size - the primary concern is keeping the entire GPU busy. The number of blocks in a grid should be larger than the number of multiprocessors so that all multiprocessors have at least one block to execute. Furthermore, there should be multiple active blocks per multiprocessor so that blocks that aren't waiting for a __syncthreads() can keep the hardware busy. This recommendation is subject to resource availability; therefore, it should be determined in the context of the second execution parameter - the number of threads per block, or block size - as well as shared memory usage. To scale to future devices, the number of blocks per kernel launch should be in the thousands.
When choosing the block size, it is important to remember that multiple concurrent blocks can reside on a multiprocessor, so occupancy is not determined by block size alone. In particular, a larger block size does not imply a higher occupancy. For example, on a device of compute capability 1.1 or lower, a kernel with a maximum block size of 512 threads results in an occupancy of 66 percent because the maximum number of threads per multiprocessor on such a device is 768. Hence, only a single block can be active per multiprocessor. However, a kernel with 256 threads per block on such a device can result in 100 percent occupancy with three resident active blocks.
As mentioned in Occupancy, higher occupancy does not always equate to better performance. For example, improving occupancy from 66 percent to 100 percent generally does not translate to a similar increase in performance. A lower occupancy kernel will have more registers available per thread than a higher occupancy kernel, which may result in less register spilling to local memory. Typically, once an occupancy of 50 percent has been reached, additional increases in occupancy do not translate into improved performance. It is in some cases possible to fully cover latency with even fewer warps, notably via instruction-level parallelism (ILP); for discussion, see http://www.nvidia.com/content/GTC-2010/pdfs/2238_GTC2010.pdf.
There are many such factors involved in selecting block size, and inevitably some experimentation is required. However, a few rules of thumb should be followed:
- Threads per block should be a multiple of warp size to avoid wasting computation on under-populated warps and to facilitate coalescing.
- A minimum of 64 threads per block should be used, and only if there are multiple concurrent blocks per multiprocessor.
- Between 128 and 256 threads per block is a better choice and a good initial range for experimentation with different block sizes.
- Use several (3 to 4) smaller thread blocks rather than one large thread block per multiprocessor if latency affects performance. This is particularly beneficial to kernels that frequently call __syncthreads().
Note that when a thread block allocates more registers than are available on a multiprocessor, the kernel launch fails, as it will when too much shared memory or too many threads are requested.
11. Instruction Optimization
Awareness of how instructions are executed often permits low-level optimizations that can be useful, especially in code that is run frequently (the so-called hot spot in a program). Best practices suggest that this optimization be performed after all higher-level optimizations have been completed.
11.1. Arithmetic Instructions
Single-precision floats provide the best performance, and their use is highly encouraged. The throughput of individual arithmetic operations is detailed in the CUDA C Programming Guide.
11.1.1. Division Modulo Operations
Integer division and modulo operations are particularly costly and should be avoided or replaced with bitwise operations whenever possible: If is a power of 2, ( ) is equivalent to ( ) and ( ) is equivalent to ( ).
The compiler will perform these conversions if n is literal. (For further information, refer to Performance Guidelines in the CUDA C Programming Guide).
11.1.2. Reciprocal Square Root
The reciprocal square root should always be invoked explicitly as rsqrtf() for single precision and rsqrt() for double precision. The compiler optimizes 1.0f/sqrtf(x) into rsqrtf() only when this does not violate IEEE-754 semantics.
11.1.3. Other Arithmetic Instructions
The compiler must on occasion insert conversion instructions, introducing additional execution cycles. This is the case for:
- Functions operating on char or short whose operands generally need to be converted to an int
- Double-precision floating-point constants (defined without any type suffix) used as input to single-precision floating-point computations
The latter case can be avoided by using single-precision floating-point constants, defined with an f suffix such as 3.141592653589793f, 1.0f, 0.5f. This suffix has accuracy implications in addition to its ramifications on performance. The effects on accuracy are discussed in Promotions to Doubles and Truncations to Floats. Note that this distinction is particularly important to performance on devices of compute capability 2.x.
For single-precision code, use of the float type and the single-precision math functions are highly recommended. When compiling for devices without native double-precision support such as devices of compute capability 1.2 and earlier, each double-precision floating-point variable is converted to single-precision floating-point format (but retains its size of 64 bits) and double-precision arithmetic is demoted to single-precision arithmetic.
It should also be noted that the CUDA math library's complementary error function, erfcf(), is particularly fast with full single-precision accuracy.
11.1.4. Exponentiation With Small Fractional Arguments
For some fractional exponents, exponentiation can be accelerated significantly compared to the use of pow() by using square roots, cube roots, and their inverses. For those exponentiations where the exponent is not exactly representable as a floating-point number, such as 1/3, this can also provide much more accurate results, as use of pow() magnifies the initial representational error.
The formulas in the table below are valid for x >= 0, x != -0, that is, signbit(x) == 0.
| Computation | Formula | ulps (double) 1 | ulps (single) 2 |
|---|---|---|---|
| x1/9 | r = rcbrt(rcbrt(x)) | 1 | 1/1 |
| x-1/9 | r = cbrt(rcbrt(x)) | 1 | 1/1 |
| x1/6 | r = rcbrt(rsqrt(x)) | 1 | 2/2 |
| x-1/6 | r = rcbrt(sqrt(x)) | 1 | 1/2 |
| x1/4 | r = rsqrt(rsqrt(x)) | 1 | 2/2 |
| x-1/4 | r = sqrt(rsqrt(x)) | 1 | 1/3 |
| x1/3 | r = cbrt(x) | 1 | 1/1 |
| x-1/3 | r = rcbrt(x) | 1 | 1/1 |
| x1/2 | r = sqrt(x) | 0 | 0/3 |
| x-1/2 | r = rsqrt(x) | 1 | 2/2 |
| x2/3 | r = cbrt(x); r = r*r | 2 | 3/3 |
| x-2/3 | r = rcbrt(x); r = r*r | 2 | 3/3 |
| x3/4 | r = sqrt(x); r = r*sqrt(r) | 2 | 2/6 |
| x-3/4 | r = rsqrt(x); r = r*sqrt(r) | 2 | 4/5 |
| x7/6 | r = x*rcbrt(rsqrt(x)) | 2 | 2/2 |
| x-7/6 | r = (1/x) * rcbrt(sqrt(x)) | 2 | 3/3 |
| x5/4 | r = x*rsqrt(rsqrt(x)) | 2 | 3/3 |
| x-5/4 | r = (1/x)*sqrt(rsqrt(x)) | 2 | 3/5 |
| x4/3 | r = x*cbrt(x) | 1 | 2/2 |
| x-4/3 | r = (1/x)*rcbrt(x) | 2 | 2/3 |
| x3/2 | r = x*sqrt(x) | 1 | 1/3 |
| x-3/2 | r = (1/x)*sqrt(x) | 2 | 3/3 |
| 1 Compared to correctly rounded result | |||
|
2Compared to correctly rounded result 1st: -prec-sqrt=true -prec-div=true 2nd: -prec-sqrt=false -prec-div=false |
|||
11.1.5. Math Libraries
Two types of runtime math operations are supported. They can be distinguished by their names: some have names with prepended underscores, whereas others do not (e.g., __functionName() versus functionName()). Functions following the __functionName() naming convention map directly to the hardware level. They are faster but provide somewhat lower accuracy (e.g., __sinf(x) and __expf(x)). Functions following functionName() naming convention are slower but have higher accuracy (e.g., sinf(x) and expf(x)). The throughput of __sinf(x), __cosf(x), and __expf(x) is much greater than that of sinf(x), cosf(x), and expf(x). The latter become even more expensive (about an order of magnitude slower) if the magnitude of the argument x needs to be reduced. Moreover, in such cases, the argument-reduction code uses local memory, which can affect performance even more because of the high latency of local memory. More details are available in the CUDA C Programming Guide.
Note also that whenever sine and cosine of the same argument are computed, the sincos family of instructions should be used to optimize performance:
- __sincosf() for single-precision fast math (see next paragraph)
- sincosf() for regular single-precision
- sincos() for double precision
The -use_fast_math compiler option of nvcc coerces every functionName() call to the equivalent __functionName() call. This switch should be used whenever accuracy is a lesser priority than the performance. This is frequently the case with transcendental functions. Note this switch is effective only on single-precision floating point.
For small integer powers (e.g., x2 or x3), explicit multiplication is almost certainly faster than the use of general exponentiation routines such as pow(). While compiler optimization improvements continually seek to narrow this gap, explicit multiplication (or the use of an equivalent purpose-built inline function or macro) can have a significant advantage. This advantage is increased when several powers of the same base are needed (e.g., where both x2 and x5 are calculated in close proximity), as this aids the compiler in its common sub-expression elimination (CSE) optimization.
For exponentiation using base 2 or 10, use the functions exp2() or expf2() and exp10() or expf10() rather than the functions pow() or powf(). Both pow() and powf() are heavy-weight functions in terms of register pressure and instruction count due to the numerous special cases arising in general exponentiation and the difficulty of achieving good accuracy across the entire ranges of the base and the exponent. The functions exp2(), exp2f(), exp10(), and exp10f(), on the other hand, are similar to exp() and expf() in terms of performance, and can be as much as ten times faster than their pow()/powf() equivalents.
For exponentiation with an exponent of 1/3, use the cbrt() or cbrtf() function rather than the generic exponentiation functions pow() or powf(), as the former are significantly faster than the latter. Likewise, for exponentation with an exponent of -1/3, use rcbrt() or rcbrtf().
Replace sin(π*<expr>) with sinpi(<expr>), cos(π*<expr>) with cospi(<expr>), and sincos(π*<expr>) with sincospi(<expr>). This is advantageous with regard to both accuracy and performance. As a particular example, to evaluate the sine function in degrees instead of radians, use sinpi(x/180.0). Similarly, the single-precision functions sinpif(), cospif(), and sincospif() should replace calls to sinf(), cosf(), and sincosf() when the function argument is of the form π*<expr>. (The performance advantage sinpi() has over sin() is due to simplified argument reduction; the accuracy advantage is because sinpi() multiplies by π only implicitly, effectively using an infinitely precise mathematical π rather than a single- or double-precision approximation thereof.)
11.2. Memory Instructions
Memory instructions include any instruction that reads from or writes to shared, local, or global memory. When accessing uncached local or global memory, there are 400 to 600 clock cycles of memory latency.
As an example, the assignment operator in the following sample code has a high throughput, but, crucially, there is a latency of 400 to 600 clock cycles to read data from global memory:
__shared__ float shared[32]; __device__ float device[32]; shared[threadIdx.x] = device[threadIdx.x];
Much of this global memory latency can be hidden by the thread scheduler if there are sufficient independent arithmetic instructions that can be issued while waiting for the global memory access to complete. However, it is best to avoid accessing global memory whenever possible.
12. Control Flow
12.1. Branching and Divergence
Flow control instructions (if, switch, do, for, while) can significantly affect the instruction throughput by causing threads of the same warp to diverge; that is, to follow different execution paths. If this happens, the different execution paths must be executed separately; this increases the total number of instructions executed for this warp.
To obtain best performance in cases where the control flow depends on the thread ID, the controlling condition should be written so as to minimize the number of divergent warps.
This is possible because the distribution of the warps across the block is deterministic as mentioned in SIMT Architecture of the CUDA C Programming Guide. A trivial example is when the controlling condition depends only on (threadIdx / WSIZE) where WSIZE is the warp size.
In this case, no warp diverges because the controlling condition is perfectly aligned with the warps.
For branches including just a few instructions, warp divergence generally results in marginal performance losses. For example, the compiler may use predication to avoid an actual branch. Instead, all instructions are scheduled, but a per-thread condition code or predicate controls which threads execute the instructions. Threads with a false predicate do not write results, and also do not evaluate addresses or read operands.
Starting with the Volta architecture, Independent Thread Scheduling allows a warp to remain diverged outside of the data-dependent conditional block. An explicit __syncwarp() can be used to guarantee that the warp has reconverged for subsequent instructions.
12.2. Branch Predication
Sometimes, the compiler may unroll loops or optimize out if or switch statements by using branch predication instead. In these cases, no warp can ever diverge. The programmer can also control loop unrolling using
#pragma unroll
For more information on this pragma, refer to the CUDA C Programming Guide.
When using branch predication, none of the instructions whose execution depends on the controlling condition is skipped. Instead, each such instruction is associated with a per-thread condition code or predicate that is set to true or false according to the controlling condition. Although each of these instructions is scheduled for execution, only the instructions with a true predicate are actually executed. Instructions with a false predicate do not write results, and they also do not evaluate addresses or read operands.
The compiler replaces a branch instruction with predicated instructions only if the number of instructions controlled by the branch condition is less than or equal to a certain threshold: If the compiler determines that the condition is likely to produce many divergent warps, this threshold is 7; otherwise it is 4.
12.3. Loop Counters Signed vs. Unsigned
In the C language standard, unsigned integer overflow semantics are well defined, whereas signed integer overflow causes undefined results. Therefore, the compiler can optimize more aggressively with signed arithmetic than it can with unsigned arithmetic. This is of particular note with loop counters: since it is common for loop counters to have values that are always positive, it may be tempting to declare the counters as unsigned. For slightly better performance, however, they should instead be declared as signed.
For example, consider the following code:
for (i = 0; i < n; i++) {
out[i] = in[offset + stride*i];
}Here, the sub-expression stride*i could overflow a 32-bit integer, so if i is declared as unsigned, the overflow semantics prevent the compiler from using some optimizations that might otherwise have applied, such as strength reduction. If instead i is declared as signed, where the overflow semantics are undefined, the compiler has more leeway to use these optimizations.
12.4. Synchronizing Divergent Threads in a Loop
Synchronizing threads inside potentially divergent code (e.g., a loop over an input array) can cause unanticipated errors. Care must be taken to ensure that all threads are converged at the point where __syncthreads() is called. The following example illustrates how to do this properly for 1D blocks:
unsigned int imax = blockDim.x * ((nelements + blockDim.x - 1)/ blockDim.x); for (int i = threadidx.x; i < imax; i += blockDim.x) { if (i < nelements) { ... } __syncthreads(); if (i < nelements) { ... } }
In this example, the loop has been carefully written to have the same number of iterations for each thread, avoiding divergence (imax is the number of elements rounded up to a multiple of the block size). Guards have been added inside the loop to prevent out-of-bound accesses. At the point of the __syncthreads(), all threads are converged.
Similar care must be taken when invoking __syncthreads() from a device function called from potentially divergent code. A straightforward method of solving this issue is to call the device function from non-divergent code and pass a thread_active flag as a parameter to the device function. This thread_active flag would be used to indicate which threads should participate in the computation inside the device function, allowing all threads to participate in the __syncthreads().
13. Deploying CUDA Applications
Having completed the GPU acceleration of one or more components of the application it is possible to compare the outcome with the original expectation. Recall that the initial assess step allowed the developer to determine an upper bound for the potential speedup attainable by accelerating given hotspots.
Before tackling other hotspots to improve the total speedup, the developer should consider taking the partially parallelized implementation and carry it through to production. This is important for a number of reasons; for example, it allows the user to profit from their investment as early as possible (the speedup may be partial but is still valuable), and it minimizes risk for the developer and the user by providing an evolutionary rather than revolutionary set of changes to the application.
14. Understanding the Programming Environment
With each generation of NVIDIA processors, new features are added to the GPU that CUDA can leverage. Consequently, it's important to understand the characteristics of the architecture.
Programmers should be aware of two version numbers. The first is the compute capability, and the second is the version number of the CUDA Runtime and CUDA Driver APIs.
14.1. CUDA Compute Capability
The compute capability describes the features of the hardware and reflects the set of instructions supported by the device as well as other specifications, such as the maximum number of threads per block and the number of registers per multiprocessor. Higher compute capability versions are supersets of lower (that is, earlier) versions, so they are backward compatible.
The compute capability of the GPU in the device can be queried programmatically as illustrated in the deviceQuery CUDA Sample. The output for that program is shown in Figure 12. This information is obtained by calling cudaGetDeviceProperties() and accessing the information in the structure it returns.
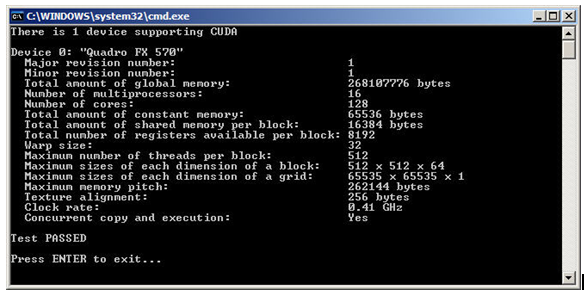
The major and minor revision numbers of the compute capability are shown on the third and fourth lines of Figure 12. Device 0 of this system has compute capability 1.1.
More details about the compute capabilities of various GPUs are in CUDA-Enabled GPUs and Compute Capabilities of the CUDA C Programming Guide. In particular, developers should note the number of multiprocessors on the device, the number of registers and the amount of memory available, and any special capabilities of the device.
14.2. Additional Hardware Data
Certain hardware features are not described by the compute capability. For example, the ability to overlap kernel execution with asynchronous data transfers between the host and the device is available on most but not all GPUs with compute capability 1.1. In such cases, call cudaGetDeviceProperties() to determine whether the device is capable of a certain feature. For example, the asyncEngineCount field of the device property structure indicates whether overlapping kernel execution and data transfers is possible (and, if so, how many concurrent transfers are possible); likewise, the canMapHostMemory field indicates whether zero-copy data transfers can be performed.
14.3. CUDA Runtime and Driver API Version
The CUDA Driver API and the CUDA Runtime are two of the programming interfaces to CUDA. Their version number enables developers to check the features associated with these APIs and decide whether an application requires a newer (later) version than the one currently installed. This is important because the CUDA Driver API is backward compatible but not forward compatible, meaning that applications, plug-ins, and libraries (including the CUDA Runtime) compiled against a particular version of the Driver API will continue to work on subsequent (later) driver releases. However, applications, plug-ins, and libraries (including the CUDA Runtime) compiled against a particular version of the Driver API may not work on earlier versions of the driver, as illustrated in Figure 13.
14.4. Which Compute Capability Target
When in doubt about the compute capability of the hardware that will be present at runtime, it is best to assume a compute capability of 2.0 as defined in the CUDA C Programming Guide section on Technical and Feature Specifications.
To target specific versions of NVIDIA hardware and CUDA software, use the -arch, -code, and -gencode options of nvcc. Code that uses the warp shuffle operation, for example, must be compiled with -arch=sm_30 (or higher compute capability).
See Building for Maximum Compatibility for further discussion of the flags used for building code for multiple generations of CUDA-capable device simultaneously.
14.5. CUDA Runtime
The host runtime component of the CUDA software environment can be used only by host functions. It provides functions to handle the following:
- Device management
- Context management
- Memory management
- Code module management
- Execution control
- Texture reference management
- Interoperability with OpenGL and Direct3D
As compared to the lower-level CUDA Driver API, the CUDA Runtime greatly eases device management by providing implicit initialization, context management, and device code module management. The C/C++ host code generated by nvcc utilizes the CUDA Runtime, so applications that link to this code will depend on the CUDA Runtime; similarly, any code that uses the cuBLAS, cuFFT, and other CUDA Toolkit libraries will also depend on the CUDA Runtime, which is used internally by these libraries.
The functions that make up the CUDA Runtime API are explained in the CUDA Toolkit Reference Manual.
The CUDA Runtime handles kernel loading and setting up kernel parameters and launch configuration before the kernel is launched. The implicit driver version checking, code initialization, CUDA context management, CUDA module management (cubin to function mapping), kernel configuration, and parameter passing are all performed by the CUDA Runtime.
It comprises two principal parts:
- A C-style function interface (cuda_runtime_api.h).
- C++-style convenience wrappers (cuda_runtime.h) built on top of the C-style functions.
For more information on the Runtime API, refer to CUDA C Runtime of the CUDA C Programming Guide.
15. Preparing for Deployment
15.1. Testing for CUDA Availability
When deploying a CUDA application, it is often desirable to ensure that the an application will continue to function properly even if the target machine does not have a CUDA-capable GPU and/or a sufficient version of the NVIDIA Driver installed. (Developers targeting a single machine with known configuration may choose to skip this section.)
Detecting a CUDA-Capable GPU
When an application will be deployed to target machines of arbitrary/unknown configuration, the application should explicitly test for the existence of a CUDA-capable GPU in order to take appropriate action when no such device is available. The cudaGetDeviceCount() function can be used to query for the number of available devices. Like all CUDA Runtime API functions, this function will fail gracefully and return cudaErrorNoDevice to the application if there is no CUDA-capable GPU or cudaErrorInsufficientDriver if there is not an appropriate version of the NVIDIA Driver installed. If cudaGetDeviceCount() reports an error, the application should fall back to an alternative code path.
A system with multiple GPUs may contain GPUs of different hardware versions and capabilities. When using multiple GPUs from the same application, it is recommended to use GPUs of the same type, rather than mixing hardware generations. The cudaChooseDevice() function can be used to select the device that most closely matches a desired set of features.
Detecting Hardware and Software Configuration
When an application depends on the availability of certain hardware or software capabilities to enable certain functionality, the CUDA API can be queried for details about the configuration of the available device and for the installed software versions.
The cudaGetDeviceProperties() function reports various features of the available devices, including the CUDA Compute Capability of the device (see also the Compute Capabilities section of the CUDA C Programming Guide). See CUDA Runtime and Driver API Version for details on how to query the available CUDA software API versions.
15.2. Error Handling
All CUDA Runtime API calls return an error code of type cudaError_t; the return value will be equal to cudaSuccess if no errors have occurred. (The exceptions to this are kernel launches, which return void, and cudaGetErrorString(), which returns a character string describing the cudaError_t code that was passed into it.) The CUDA Toolkit libraries (cuBLAS, cuFFT, etc.) likewise return their own sets of error codes.
Since some CUDA API calls and all kernel launches are asynchronous with respect to the host code, errors may be reported to the host asynchronously as well; often this occurs the next time the host and device synchronize with each other, such as during a call to cudaMemcpy() or to cudaDeviceSynchronize().
Always check the error return values on all CUDA API functions, even for functions that are not expected to fail, as this will allow the application to detect and recover from errors as soon as possible should they occur. Applications that do not check for CUDA API errors could at times run to completion without having noticed that the data calculated by the GPU is incomplete, invalid, or uninitialized.
15.3. Building for Maximum Compatibility
Each generation of CUDA-capable device has an associated compute capability version that indicates the feature set supported by the device (see CUDA Compute Capability). One or more compute capability versions can be specified to the nvcc compiler while building a file; compiling for the native compute capability for the target GPU(s) of the application is important to ensure that application kernels achieve the best possible performance and are able to use the features that are available on a given generation of GPU.
When an application is built for multiple compute capabilities simultaneously (using several instances of the -gencode flag to nvcc), the binaries for the specified compute capabilities are combined into the executable, and the CUDA Driver selects the most appropriate binary at runtime according to the compute capability of the present device. If an appropriate native binary (cubin) is not available, but the intermediate PTX code (which targets an abstract virtual instruction set and is used for forward-compatibility) is available, then the kernel will be compiled Just In Time (JIT) (see Compiler JIT Cache Management Tools) from the PTX to the native cubin for the device. If the PTX is also not available, then the kernel launch will fail.
Windows
nvcc.exe -ccbin "C:\vs2008\VC\bin" -Xcompiler "/EHsc /W3 /nologo /O2 /Zi /MT" -gencode=arch=compute_20,code=sm_20 -gencode=arch=compute_30,code=sm_30 -gencode=arch=compute_35,code=sm_35 -gencode=arch=compute_50,code=sm_50 -gencode=arch=compute_50,code=compute_50 --compile -o "Release\mykernel.cu.obj" "mykernel.cu"
Mac/Linux
/usr/local/cuda/bin/nvcc -gencode=arch=compute_20,code=sm_20 -gencode=arch=compute_30,code=sm_30 -gencode=arch=compute_35,code=sm_35 -gencode=arch=compute_50,code=sm_50 -gencode=arch=compute_50,code=compute_50 -O2 -o mykernel.o -c mykernel.cu
Alternatively, the nvcc command-line option -arch=sm_XX can be used as a shorthand equivalent to the following more explicit -gencode= command-line options described above:
-gencode=arch=compute_XX,code=sm_XX -gencode=arch=compute_XX,code=compute_XX
However, while the -arch=sm_XX command-line option does result in inclusion of a PTX back-end target by default (due to the code=compute_XX target it implies), it can only specify a single target cubin architecture at a time, and it is not possible to use multiple -arch= options on the same nvcc command line, which is why the examples above use -gencode= explicitly.
15.4. Distributing the CUDA Runtime and Libraries
CUDA applications are built against the CUDA Runtime library, which handles device, memory, and kernel management. Unlike the CUDA Driver, the CUDA Runtime guarantees neither forward nor backward binary compatibility across versions. It is therefore best to redistribute the CUDA Runtime library with the application when using dynamic linking or else to statically link against the CUDA Runtime. This will ensure that the executable will be able to run even if the user does not have the same CUDA Toolkit installed that the application was built against.
Statically-linked CUDA Runtime
The easiest option is to statically link against the CUDA Runtime. This is the default if using nvcc to link in CUDA 5.5 and later. Static linking makes the executable slightly larger, but it ensures that the correct version of runtime library functions are included in the application binary without requiring separate redistribution of the CUDA Runtime library.
Dynamically-linked CUDA Runtime
If static linking against the CUDA Runtime is impractical for some reason, then a dynamically-linked version of the CUDA Runtime library is also available. (This was the default and only option provided in CUDA versions 5.0 and earlier.)
To use dynamic linking with the CUDA Runtime when using the nvcc from CUDA 5.5 or later to link the application, add the --cudart=shared flag to the link command line; otherwise the statically-linked CUDA Runtime library is used by default.
After the application is dynamically linked against the CUDA Runtime, this version of the runtime library should be bundled with the application. It can be copied into the same directory as the application executable or into a subdirectory of that installation path.
Other CUDA Libraries
Although the CUDA Runtime provides the option of static linking, the other libraries included in the CUDA Toolkit (cuBLAS, cuFFT, etc.) are available only in dynamically-linked form. As with the dynamically-linked version of the CUDA Runtime library, these libraries should be bundled with the application executable when distributing that application.
15.4.1. CUDA Toolkit Library Redistribution
The CUDA Toolkit's End-User License Agreement (EULA) allows for redistribution of many of the CUDA libraries under certain terms and conditions. This allows applications that depend on these libraries to redistribute the exact versions of the libraries against which they were built and tested, thereby avoiding any trouble for end users who might have a different version of the CUDA Toolkit (or perhaps none at all) installed on their machines. Please refer to the EULA for details.
15.4.1.1. Which Files to Redistribute
When redistributing the dynamically-linked versions of one or more CUDA libraries, it is important to identify the exact files that need to be redistributed. The following examples use the cuBLAS library from CUDA Toolkit 5.5 as an illustration:
Linux
In a shared library on Linux, there is a string field called the SONAME that indicates the binary compatibility level of the library. The SONAME of the library against which the application was built must match the filename of the library that is redistributed with the application.
$ objdump -p /usr/local/cuda/lib64/libcublas.so | grep SONAME SONAME libcublas.so.5.5
Because of this, even if -lcublas (with no version number specified) is used when linking the application, the SONAME found at link time implies that "libcublas.so.5.5" is the name of the file that the dynamic loader will look for when loading the application and therefore must be the name of the file (or a symlink to the same) that is redistributed with the application.
$ ldd a.out | grep libcublas libcublas.so.5.5 => /usr/local/cuda/lib64/libcublas.so.5.5
Mac
In a shared library on Mac OS X, there is a field called the install name that indicates the expected installation path and filename the library; the CUDA libraries also use this filename to indicate binary compatibility. The value of this field is propagated into an application built against the library and is used to locate the library of the correct version at runtime.
For example, if the install name of the cuBLAS library is given as @rpath/libcublas.5.5.dylib, then the library is version 5.5 and the copy of this library redistributed with the application must be named libcublas.5.5.dylib, even though only -lcublas (with no version number specified) is used at link time. Furthermore, this file should be installed into the @rpath of the application; see Where to Install Redistributed CUDA Libraries.
$ otool -L a.out
a.out:
@rpath/libcublas.5.5.dylib (...)Windows
The binary compatibility version of the CUDA libraries on Windows is indicated as part of the filename.
For example, a 64-bit application linked to cuBLAS 5.5 will look for cublas64_55.dll at runtime, so this is the file that should be redistributed with that application, even though cublas.lib is the file that the application is linked against. For 32-bit applications, the file would be cublas32_55.dll.
$ dumpbin /IMPORTS a.exe
Microsoft (R) COFF/PE Dumper Version 10.00.40219.01
Copyright (C) Microsoft Corporation. All rights reserved.
Dump of file a.exe
File Type: EXECUTABLE IMAGE
Section contains the following imports:
...
cublas64_55.dll
...15.4.1.2. Where to Install Redistributed CUDA Libraries
Once the correct library files are identified for redistribution, they must be configured for installation into a location where the application will be able to find them.
On Windows, if the CUDA Runtime or other dynamically-linked CUDA Toolkit library is placed in the same directory as the executable, Windows will locate it automatically. On Linux and Mac, the -rpath linker option should be used to instruct the executable to search its local path for these libraries before searching the system paths:
Linux/Mac
nvcc -I $(CUDA_HOME)/include -Xlinker "-rpath '$ORIGIN'" --cudart=shared -o myprogram myprogram.cu
Windows
nvcc.exe -ccbin "C:\vs2008\VC\bin" -Xcompiler "/EHsc /W3 /nologo /O2 /Zi /MT" --cudart=shared -o "Release\myprogram.exe" "myprogram.cu"
To specify an alternate path where the libraries will be distributed, use linker options similar to those below:
Linux/Mac
nvcc -I $(CUDA_HOME)/include -Xlinker "-rpath '$ORIGIN/lib'" --cudart=shared -o myprogram myprogram.cu
Windows
nvcc.exe -ccbin "C:\vs2008\VC\bin" -Xcompiler "/EHsc /W3 /nologo /O2 /Zi /MT /DELAY" --cudart=shared -o "Release\myprogram.exe" "myprogram.cu"
For Linux and Mac, the -rpath option is used as before. For Windows, the /DELAY option is used; this requires that the application call SetDllDirectory() before the first call to any CUDA API function in order to specify the directory containing the CUDA DLLs.
16. Deployment Infrastructure Tools
16.1. Nvidia-SMI
The NVIDIA System Management Interface (nvidia-smi) is a command line utility that aids in the management and monitoring of NVIDIA GPU devices. This utility allows administrators to query GPU device state and, with the appropriate privileges, permits administrators to modify GPU device state. nvidia-smi is targeted at Tesla and certain Quadro GPUs, though limited support is also available on other NVIDIA GPUs. nvidia-smi ships with NVIDIA GPU display drivers on Linux, and with 64-bit Windows Server 2008 R2 and Windows 7. nvidia-smi can output queried information as XML or as human-readable plain text either to standard output or to a file. See the nvidia-smi documenation for details. Please note that new versions of nvidia-smi are not guaranteed to be backward-compatible with previous versions.
16.1.1. Queryable state
- ECC error counts
- Both correctable single-bit and detectable double-bit errors are reported. Error counts are provided for both the current boot cycle and the lifetime of the GPU.
- GPU utilization
- Current utilization rates are reported for both the compute resources of the GPU and the memory interface.
- Active compute process
- The list of active processes running on the GPU is reported, along with the corresponding process name/ID and allocated GPU memory.
- Clocks and performance state
- Max and current clock rates are reported for several important clock domains, as well as the current GPU performance state (pstate).
- Temperature and fan speed
- The current GPU core temperature is reported, along with fan speeds for products with active cooling.
- Power management
- The current board power draw and power limits are reported for products that report these measurements.
- Identification
- Various dynamic and static information is reported, including board serial numbers, PCI device IDs, VBIOS/Inforom version numbers and product names.
16.1.2. Modifiable state
- ECC mode
- Enable and disable ECC reporting.
- ECC reset
- Clear single-bit and double-bit ECC error counts.
- Compute mode
- Indicate whether compute processes can run on the GPU and whether they run exclusively or concurrently with other compute processes.
- Persistence mode
- Indicate whether the NVIDIA driver stays loaded when no applications are connected to the GPU. It is best to enable this option in most circumstances.
- GPU reset
- Reinitialize the GPU hardware and software state via a secondary bus reset.
16.2. NVML
The NVIDIA Management Library (NVML) is a C-based interface that provides direct access to the queries and commands exposed via nvidia-smi intended as a platform for building 3rd-party system management applications. The NVML API is available on the NVIDIA developer website as part of the Tesla Deployment Kit through a single header file and is accompanied by PDF documentation, stub libraries, and sample applications; see http://developer.nvidia.com/tesla-deployment-kit. Each new version of NVML is backward-compatible.
An additional set of Perl and Python bindings are provided for the NVML API. These bindings expose the same features as the C-based interface and also provide backwards compatibility. The Perl bindings are provided via CPAN and the Python bindings via PyPI.
All of these products (nvidia-smi, NVML, and the NVML language bindings) are updated with each new CUDA release and provide roughly the same functionality.
See http://developer.nvidia.com/nvidia-management-library-nvml for additional information.
16.3. Cluster Management Tools
Managing your GPU cluster will help achieve maximum GPU utilization and help you and your users extract the best possible performance. Many of the industry's most popular cluster management tools now support CUDA GPUs via NVML. For a listing of some of these tools, see http://developer.nvidia.com/cluster-management.
16.4. Compiler JIT Cache Management Tools
Any PTX device code loaded by an application at runtime is compiled further to binary code by the device driver. This is called just-in-time compilation (JIT). Just-in-time compilation increases application load time but allows applications to benefit from latest compiler improvements. It is also the only way for applications to run on devices that did not exist at the time the application was compiled.
When JIT compilation of PTX device code is used, the NVIDIA driver caches the resulting binary code on disk. Some aspects of this behavior such as cache location and maximum cache size can be controlled via the use of environment variables; see Just in Time Compilation of the CUDA C Programming Guide.
16.5. CUDA_VISIBLE_DEVICES
It is possible to rearrange the collection of installed CUDA devices that will be visible to and enumerated by a CUDA application prior to the start of that application by way of the CUDA_VISIBLE_DEVICES environment variable.
Devices to be made visible to the application should be included as a comma-separated list in terms of the system-wide list of enumerable devices. For example, to use only devices 0 and 2 from the system-wide list of devices, set CUDA_VISIBLE_DEVICES=0,2 before launching the application. The application will then enumerate these devices as device 0 and device 1, respectively.
A. Recommendations and Best Practices
This appendix contains a summary of the recommendations for optimization that are explained in this document.
A.1. Overall Performance Optimization Strategies
Performance optimization revolves around three basic strategies:
- Maximizing parallel execution
- Optimizing memory usage to achieve maximum memory bandwidth
- Optimizing instruction usage to achieve maximum instruction throughput
Maximizing parallel execution starts with structuring the algorithm in a way that exposes as much data parallelism as possible. Once the parallelism of the algorithm has been exposed, it needs to be mapped to the hardware as efficiently as possible. This is done by carefully choosing the execution configuration of each kernel launch. The application should also maximize parallel execution at a higher level by explicitly exposing concurrent execution on the device through streams, as well as maximizing concurrent execution between the host and the device.
Optimizing memory usage starts with minimizing data transfers between the host and the device because those transfers have much lower bandwidth than internal device data transfers. Kernel access to global memory also should be minimized by maximizing the use of shared memory on the device. Sometimes, the best optimization might even be to avoid any data transfer in the first place by simply recomputing the data whenever it is needed.
The effective bandwidth can vary by an order of magnitude depending on the access pattern for each type of memory. The next step in optimizing memory usage is therefore to organize memory accesses according to the optimal memory access patterns. This optimization is especially important for global memory accesses, because latency of access costs hundreds of clock cycles. Shared memory accesses, in counterpoint, are usually worth optimizing only when there exists a high degree of bank conflicts.
As for optimizing instruction usage, the use of arithmetic instructions that have low throughput should be avoided. This suggests trading precision for speed when it does not affect the end result, such as using intrinsics instead of regular functions or single precision instead of double precision. Finally, particular attention must be paid to control flow instructions due to the SIMT (single instruction multiple thread) nature of the device.
B. nvcc Compiler Switches
B.1. nvcc
The NVIDIA nvcc compiler driver converts .cu files into C for the host system and CUDA assembly or binary instructions for the device. It supports a number of command-line parameters, of which the following are especially useful for optimization and related best practices:
- -maxrregcount=N specifies the maximum number of registers kernels can use at a per-file level. See Register Pressure. (See also the __launch_bounds__ qualifier discussed in Execution Configuration of the CUDA C Programming Guide to control the number of registers used on a per-kernel basis.)
- --ptxas-options=-v or -Xptxas=-v lists per-kernel register, shared, and constant memory usage.
- -ftz=true (denormalized numbers are flushed to zero)
- -prec-div=false (less precise division)
- -prec-sqrt=false (less precise square root)
- -use_fast_math compiler option of nvcc coerces every functionName() call to the equivalent __functionName() call. This makes the code run faster at the cost of diminished precision and accuracy. See Math Libraries.
Notices
Notice
ALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATELY, "MATERIALS") ARE BEING PROVIDED "AS IS." NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE.
Information furnished is believed to be accurate and reliable. However, NVIDIA Corporation assumes no responsibility for the consequences of use of such information or for any infringement of patents or other rights of third parties that may result from its use. No license is granted by implication of otherwise under any patent rights of NVIDIA Corporation. Specifications mentioned in this publication are subject to change without notice. This publication supersedes and replaces all other information previously supplied. NVIDIA Corporation products are not authorized as critical components in life support devices or systems without express written approval of NVIDIA Corporation.