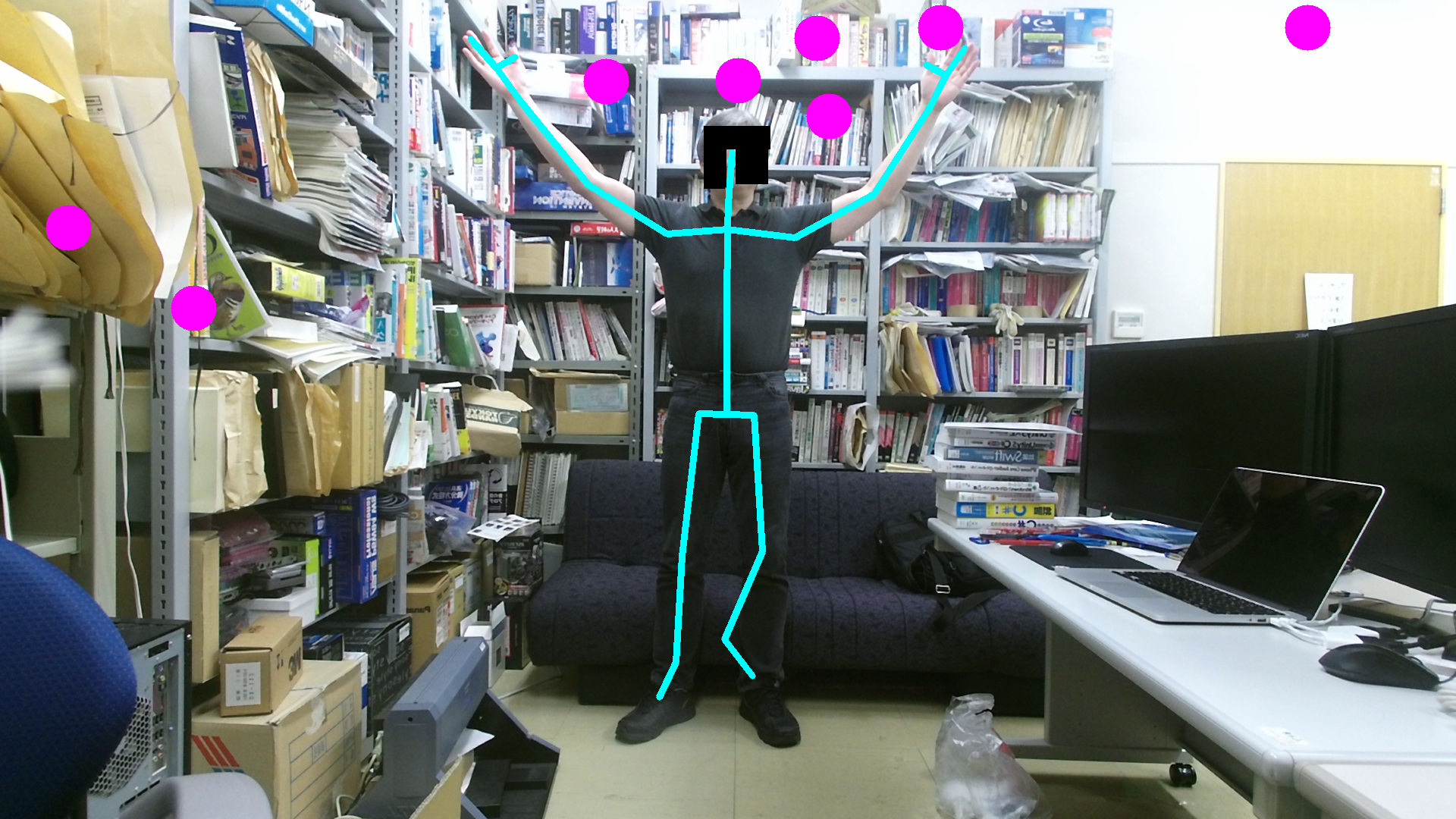
仮想的に上から降ってきたボールを、骨格で跳ね返して下に落ちないようにするゲームを作ってみましょう。 説明を簡単にするため点数の処理などはしていません。
プロジェクトのソースを置くフォルダに Ball.h をコピーしてから、プロジェクトに加えます。
| Ball.h |
#pragma once
#include <iostream>
#include <sstream>
#include <opencv2/opencv.hpp>
using namespace std;
class Ball
{
#define EPS 1.0e-6
private:
cv::Vec3f pos;
cv::Vec3f vel;
cv::Vec3f accel;
double r;
public:
Ball() : pos(0, 0, 0), vel(0, 0, 0), accel(0, 0, 0), r(1.0) {}
Ball(cv::Vec3f &pos, cv::Vec3f &v, cv::Vec3f &accel, double r) {
this->pos = pos;
this->vel = v;
this->accel = accel;
this->r = r;
}
~Ball() {}
void setPos(cv::Vec3f &pos) { this->pos = pos; }
cv::Vec3f getPos() { return pos; }
void setV(cv::Vec3f &v) { this->vel = v; }
cv::Vec3f getV() { return vel; }
void setAccel(cv::Vec3f &a) { accel = a; }
cv::Vec3f getAccel() { return accel; }
void setR(double r) { this->r = r; }
double getR() { return r; }
void step() {
vel += accel;
pos += vel;
}
bool bounce(pair<cv::Vec3f, cv::Vec3f> &seg) {
cv::Vec3f nearPt = nearest(seg, pos);
double len = cv::norm(pos, nearPt);
cv::Vec3f oldPos = pos - vel;
pair<cv::Vec3f, cv::Vec3f> trail(oldPos, pos);
pair<cv::Vec3f, cv::Vec3f> pr = nearest(seg, trail);
double len2 = cv::norm(pr.first, pr.second);
if (len2 < EPS) {
cv::Vec3f pt = oldPos - pr.second;
cv::Vec3f par = seg.second - seg.first;
cv::Vec3f normal = par.cross(cv::Vec3f(0, 0, 1));
normal /= cv::norm(normal);
double cs = pt.dot(normal);
if (cs < 0){
normal *= -1.0; cs *= -1.0;
}
vel = 2 * cs * normal - pt;
pos += vel;
return true;
}
else if (len < r) {
reflect(seg, nearPt);
return true;
}
return false;
}
bool bounce(Ball &ball) {
cv::Vec3f normal = pos - ball.pos;
double len = cv::norm(normal);
if (len >= r + ball.r) return false;
if (len < 1.0) {
pos[0] = -1;
normal = pos - ball.pos;
len = cv::norm(normal);
}
normal /= len;
cv::Vec3f u = -vel;
double cs = normal.dot(u);
if (cs > 0) vel = 2 * cs * normal - u;
pos += (r + ball.r - len) / 2 * normal;
normal *= -1.0;
u = -ball.vel;
cs = normal.dot(u);
if (cs > 0) ball.vel = 2 * cs * normal - u;
ball.pos += (r + ball.r - len) / 2 * normal;
return true;
}
pair<cv::Vec3f, cv::Vec3f> nearest(pair<cv::Vec3f, cv::Vec3f> &seg1, pair<cv::Vec3f, cv::Vec3f> &seg2) {
pair<cv::Vec3f, cv::Vec3f> ans;
cv::Vec3f ab = seg1.second - seg1.first, cd = seg2.second - seg2.first, ac = seg2.first - seg1.first;
cv::Vec3f v = ab.cross(cd);
if (v[2] > EPS) {
cv::Vec3f u = ac.cross(cd), w = ac.cross(ab);
double t = u[2] / v[2], s = w[2] / v[2];
if (t >= 0 - EPS && t <= 1.0 + EPS && s >= 0 - EPS && s <= 1.0 + EPS) {
if (abs(t) < EPS) { ans.first = ans.second = seg1.first; }
else if (abs(t - 1) < EPS) { ans.first = ans.second = seg1.second; }
else if (abs(s) < EPS) { ans.first = ans.second = seg2.first; }
else if (abs(s - 1) < EPS) { ans.first = ans.second = seg2.second; }
else {
ab[2] = 0.0;
ans.first = ans.second = ab*t + seg1.first;
}
return ans;
}
}
ans.first = seg1.first;
ans.second = nearest(seg2, seg1.first);
double minlen = cv::norm(ans.second, seg1.first);
v = nearest(seg2, seg1.second);
double len = cv::norm(v, seg1.second);
if (len < minlen) { ans.first = seg1.first; ans.second = v; minlen = len; }
v = nearest(seg1, seg2.first);
len = cv::norm(v, seg2.first);
if (len < minlen) { ans.first = v; ans.second = seg2.first; minlen = len; }
v = nearest(seg1, seg2.second);
len = cv::norm(v, seg2.second);
if (len < minlen) { ans.first = v; ans.second = seg2.second; minlen = len; }
return ans;
}
double minDistance(pair<cv::Vec3f, cv::Vec3f> &seg, cv::Vec3f &pt) {
cv::Vec3f nearPt = nearest(seg, pt);
return cv::norm(nearPt, pt);
}
cv::Vec3f nearest(pair<cv::Vec3f, cv::Vec3f> &seg, cv::Vec3f &pt) {
cv::Vec3f p(seg.second - seg.first), q(pt - seg.first);
double t = p.dot(q) / p.dot(p);
if (t <= 0.0 + EPS) return seg.first;
if (t >= 1.0 - EPS) return seg.second;
p = p*t + seg.first;
return p;
}
void reflect(pair<cv::Vec3f, cv::Vec3f> &seg, cv::Vec3f &nearPt) {
cv::Vec3f normal = pos - nearPt;
double len = cv::norm(normal);
if (len < 1.0) { // if ball's center is on the segment, add 2 to ball.y
pos[1] -= 2;
normal = pos - nearPt;
len = cv::norm(normal);
}
normal /= len;
if (len<r) pos += (r - len) * normal;
if (normal.dot(vel) > 0) { // same direction
vel += 5 * normal;
}
else {
cv::Vec3f u = -vel;
vel = 2 * normal.dot(u) * normal - u; // reflect
}
}
bool in(cv::Mat &image) {
return pos[0] >= 0 && pos[0] < image.cols && pos[1] >= -30 && pos[1] < image.rows;
}
void draw(cv::Mat &image, int id = -1) {
cv::Point pt((int)pos[0], (int)pos[1]);
cv::circle(image, pt, r, cv::Scalar(255, 0, 255), -1);
stringstream ss; ss << id;
if (id >= 0) cv::putText(image, ss.str(), pt, cv::FONT_HERSHEY_PLAIN, 1.0, cv::Scalar(0, 0, 255));
}
string tostring() {
stringstream ss;
ss << "ball[" << pos << " " << vel << " " << accel << " " << r << "]";
return ss.str();
}
};
|
プロジェクトのソースを置くフォルダに BallFall.h をコピーしてから、プロジェクトに加えます。
| BallFall.h |
#pragma once
#include <time.h>
#include <opencv2/opencv.hpp>
#include "Ball.h"
using namespace std;
class BallFall
{
#define N_BALL 8
private:
cv::Mat image;
vector<Ball> balls;
cv::Vec3f mouse;
public:
BallFall() {
srand((unsigned int)time(NULL));
}
~BallFall() {}
void start(int w = 640, int h = 480) {
image = cv::Mat(h, w, CV_8UC3);
for (int i = 0; i < N_BALL; i++) {
Ball ball;
randomBall(ball);
balls.push_back(ball);
}
cv::namedWindow("ball fall");
mouse[0] = -1;
}
void randomBall(Ball &b) {
cv::Vec3f pos, v, accel;
pos[0] = rand() % image.cols;
pos[1] = 0; pos[2] = 0;
v[0] = rand() % 4 - 2; v[1] = rand() % 1; v[2] = 0;
accel[0] = 0; accel[1] = 1.0; accel[2] = 0;
b.setPos(pos); b.setV(v); b.setAccel(accel); b.setR(30);
}
void step(vector<pair<cv::Vec3f, cv::Vec3f>>& segments) {
for (int i = 0; i < balls.size(); i++) balls[i].step();
for (int i = 0; i < balls.size(); i++) {
for (int j = i + 1; j < balls.size(); j++)
balls[i].bounce(balls[j]);
}
for (int i = 0; i < balls.size(); i++) {
for (int j = 0; j < segments.size(); j++)
balls[i].bounce(segments[j]);
if (!balls[i].in(image)) randomBall(balls[i]);
}
}
void draw(vector<pair<cv::Vec3f, cv::Vec3f>>& segments) {
cv::rectangle(image, cv::Rect(0, 0, image.cols, image.rows), cv::Scalar(50, 50, 50), -1);
draw(segments, image);
cv::imshow("ball fall", image);
}
void draw(vector<pair<cv::Vec3f, cv::Vec3f>>& segments, cv::Mat& image) {
for (int i = 0; i < balls.size(); i++) {
balls[i].draw(image);
}
for (int i = 0; i < segments.size(); i++) {
cv::Point p((int)segments[i].first[0], (int)segments[i].first[1]);
cv::Point q((int)segments[i].second[0], (int)segments[i].second[1]);
cv::line(image, p, q, cv::Scalar(255, 255, 0), 8);
}
}
};
|
| main.cpp |
#include <iostream> #include <sstream> #include "NtKinect.h" #include "BallFall.h" const int segment[] = { JointType_SpineBase, JointType_SpineMid, // spine JointType_SpineMid, JointType_SpineShoulder, JointType_SpineShoulder, JointType_Neck, // head JointType_Neck, JointType_Head, JointType_SpineShoulder, JointType_ShoulderLeft, // left hand JointType_ShoulderLeft, JointType_ElbowLeft, JointType_ElbowLeft, JointType_WristLeft, JointType_WristLeft, JointType_HandLeft, JointType_HandLeft, JointType_HandTipLeft, JointType_HandLeft, JointType_ThumbLeft, JointType_SpineShoulder, JointType_ShoulderRight, // right hand JointType_ShoulderRight, JointType_ElbowRight, JointType_ElbowRight, JointType_WristRight, JointType_WristRight, JointType_HandRight, JointType_HandRight, JointType_HandTipRight, JointType_HandRight, JointType_ThumbRight, JointType_SpineBase, JointType_HipLeft, // left leg JointType_HipLeft, JointType_KneeLeft, JointType_KneeLeft, JointType_AnkleLeft, JointType_AnkleLeft, JointType_FootLeft, JointType_SpineBase, JointType_HipRight, // right leg JointType_HipRight, JointType_KneeRight, JointType_KneeRight, JointType_AnkleRight, JointType_AnkleRight, JointType_FootRight, }; const int segmentSize = sizeof(segment) / sizeof(int); using namespace std; void doJob() { NtKinect kinect; BallFall bf; bool flag = false; kinect.setRGB(); bf.start(kinect.rgbImage.cols, kinect.rgbImage.rows); vector<pair<cv::Vec3f, cv::Vec3f>> skel; while (1) { kinect.setRGB(); kinect.setSkeleton(); skel.clear(); for (int i = 0; i < kinect.skeleton.size(); i++) { for (int j = 0; j < segmentSize/2; j++) { Joint joint1 = kinect.skeleton[i][segment[j * 2]]; Joint joint2 = kinect.skeleton[i][segment[j * 2 + 1]]; if (joint1.TrackingState != TrackingState_NotTracked && joint2.TrackingState != TrackingState_NotTracked) { ColorSpacePoint cp; kinect.coordinateMapper->MapCameraPointToColorSpace(joint1.Position, &cp); cv::Vec3f p1 = cv::Vec3f(cp.X, cp.Y, 0.0f); kinect.coordinateMapper->MapCameraPointToColorSpace(joint2.Position, &cp); cv::Vec3f p2 = cv::Vec3f(cp.X, cp.Y, 0.0f); skel.push_back(pair<cv::Vec3f, cv::Vec3f>(p1,p2)); } } } bf.step(skel); cv::Mat image; if (flag) image = kinect.rgbImage.clone(); else { image = cv::Mat(kinect.rgbImage.rows,kinect.rgbImage.cols,CV_8UC3); cv::rectangle(image,cv::Rect(0,0,image.cols,image.rows),cv::Scalar(0,0,0), -1); } bf.draw(skel, image); cv::imshow("ball fall", image); auto key = cv::waitKey(1); if (key == 'q') break; if (key == 'v') flag = !flag; } } int main(int argc, char** argv) { try { doJob(); } catch (exception &ex) { cout << ex.what() << endl; string s; cin >> s; } return 0; } |
上記のzipファイルには必ずしも最新の NtKinect.h が含まれていない場合があるので、 こちらから最新版をダウンロードして 差し替えてお使い下さい。