The face direction (pitch, yaw, roll) is displayed as 3 floating numbers.
Also, the state of the face is judged by 4 levels ("unknown", "no", "maybe", "yes") about 8 properties ( "happy", "engaed", "glass", "leftEyeClosed", "rightEyeClosed", "mouseOpen", "mouseMoved", "lookingAway" ).
If face states are displayed near the recognized face position, it is easy to understand which face the state is. But since the display position moves and hard to read, we will display it at the fixed position above the screen.
This project is set as follows.
| main.cpp |
#include <iostream> #include <sstream> #define USE_FACE #include "NtKinect.h" using namespace std; string faceProp[] = { "happy", "engaed", "glass", "leftEyeClosed", "rightEyeClosed", "mouseOpen", "mouseMoved", "lookingAway" }; string dstate[] = { "unknown", "no", "maybe", "yes" }; void doJob() { NtKinect kinect; while (1) { kinect.setRGB(); kinect.setSkeleton(); for (auto person : kinect.skeleton) { for (auto joint : person) { if (joint.TrackingState == TrackingState_NotTracked) continue; ColorSpacePoint cp; kinect.coordinateMapper->MapCameraPointToColorSpace(joint.Position,&cp); cv::rectangle(kinect.rgbImage, cv::Rect((int)cp.X-5, (int)cp.Y-5,10,10), cv::Scalar(0,0,255),2); } } kinect.setFace(); for (cv::Rect r : kinect.faceRect) { cv::rectangle(kinect.rgbImage, r, cv::Scalar(255, 255, 0), 2); } for (vector<PointF> vf : kinect.facePoint) { for (PointF p : vf) { cv::rectangle(kinect.rgbImage, cv::Rect((int)p.X-3, (int)p.Y-3, 6, 6), cv::Scalar(0, 255, 255), 2); } } for (int p = 0; p < kinect.faceDirection.size(); p++) { cv::Vec3f dir = kinect.faceDirection[p]; cv::putText(kinect.rgbImage, "pitch : " + to_string(dir[0]), cv::Point(200 * p + 50, 30), cv::FONT_HERSHEY_SIMPLEX, 1.2, cv::Scalar(0,230,0), 1, CV_AA); // rename CV_AA as cv::LINE_AA (in case of opencv3 and later) cv::putText(kinect.rgbImage, "yaw : " + to_string(dir[1]), cv::Point(200 * p + 50, 60), cv::FONT_HERSHEY_SIMPLEX, 1.2, cv::Scalar(0,230,0), 1, CV_AA); cv::putText(kinect.rgbImage, "roll : " + to_string(dir[2]), cv::Point(200 * p + 50, 90), cv::FONT_HERSHEY_SIMPLEX, 1.2, cv::Scalar(0,230,0), 1, CV_AA); } for (int p = 0; p < kinect.faceProperty.size(); p++) { for (int k = 0; k < FaceProperty_Count; k++) { int v = kinect.faceProperty[p][k]; cv::putText(kinect.rgbImage, faceProp[k] +" : "+ dstate[v], cv::Point(200 * p + 50, 30 * k + 120), cv::FONT_HERSHEY_SIMPLEX, 1.2, cv::Scalar(232,232,0), 1, CV_AA); } } cv::imshow("rgb", kinect.rgbImage); auto key = cv::waitKey(1); if (key == 'q') break; } cv::destroyAllWindows(); } int main(int argc, char** argv) { try { doJob(); } catch (exception &ex) { cout << ex.what() << endl; string s; cin >> s; } return 0; } |
Recognized face information is displayed above the RGB image.
In this example, face orientation and face condition are displayed for each individual at the top of the screen.
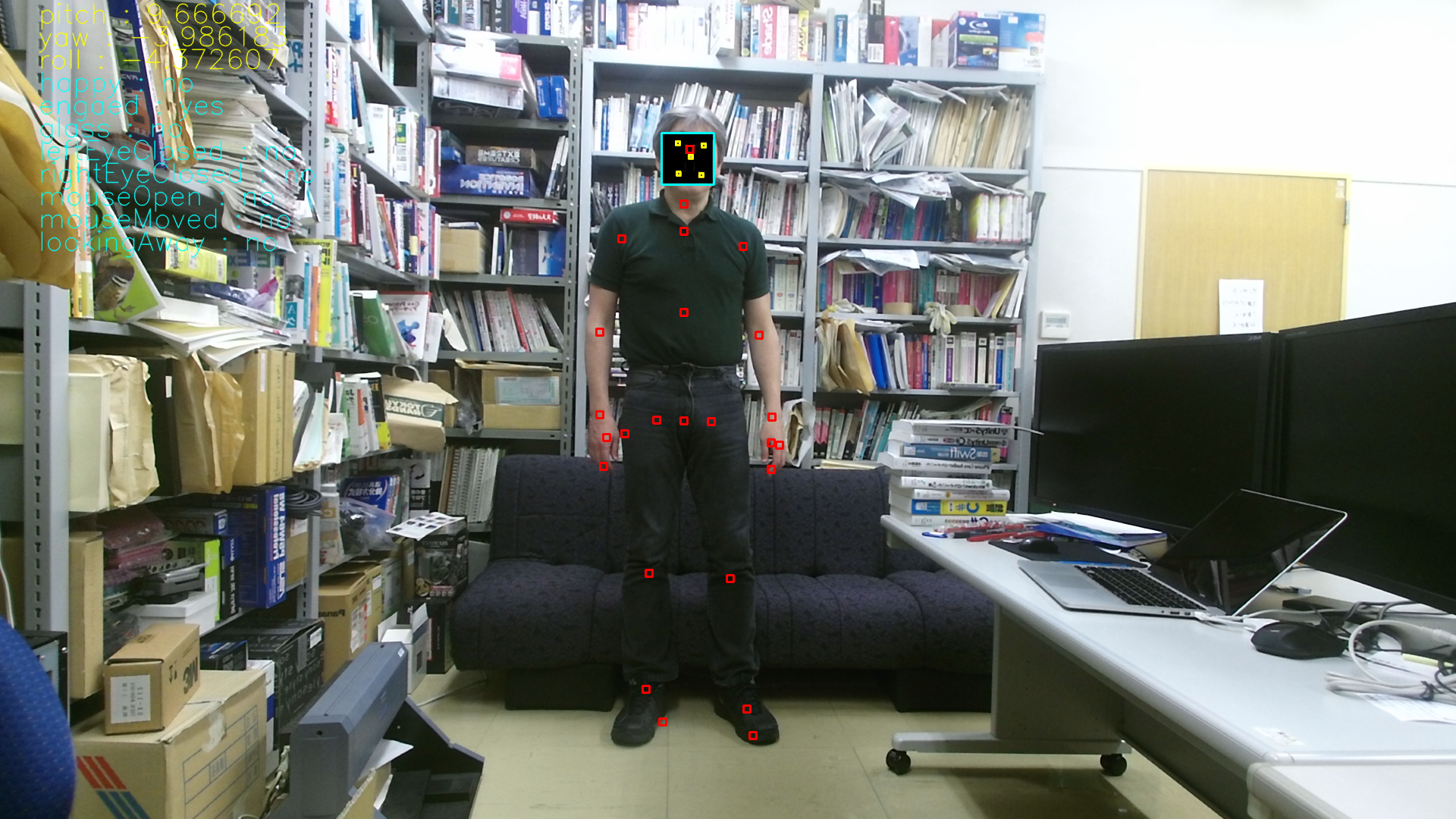
Face orientation (pitch, yaw, rall) and states of facial properties are displayed. (The color of the letters is faint and difficult to read, sorry.)
Since the above zip file may not include the latest "NtKinect.h", Download the latest version from here and replace old one with it.