It is assumed that the following softwares are installed. If the installation path is different, please read as appropriate.
|
When you use Visual Studio 2017 Professional/Community, "Desktop Development with C++" ->"Windows 8.1 SDK and UCRT SDK" option needed |
| Executable file path | C:\opencv\bin | <-- Add this path to the Path of the environment variable. |
| Include file path | C:\opencv\include | |
| Library path | C:\opencv\lib |
| Include file path | $(KINECTSDK20_DIR)inc | |
| Library path | $(KINECTSDK20_DIR)Lib\x64 |
How to create and use a DLL is explained at the Microsoft official pages.
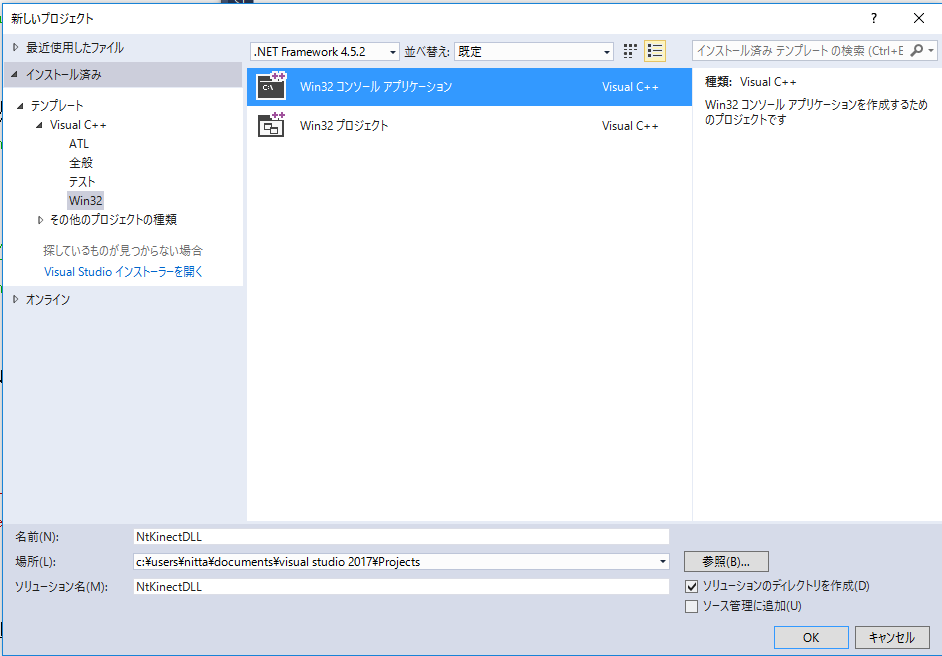
Visual Studio Community 2017 provides a project template for creating DLLs in C++.
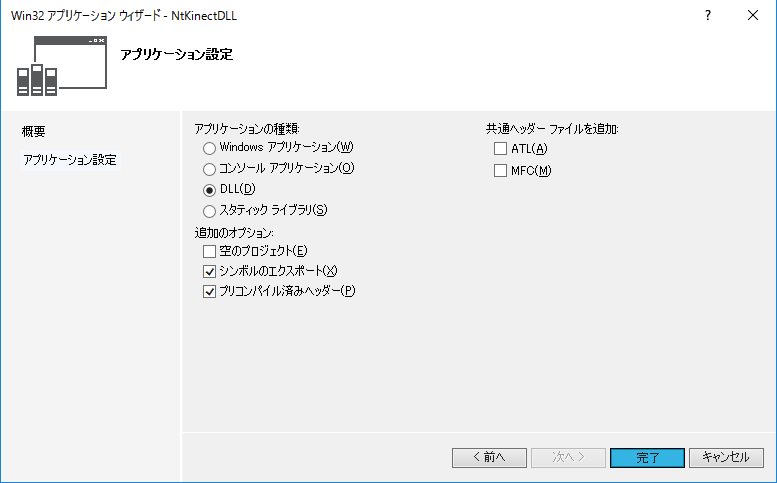
"OK" -> Select "Next" and go to "Application settings"
Examples of the declaration of variables, functions, and classes has already been inserted in the header file. Write your own declaration referring those examples. The predecessor of the function declaration "PROJECT_NAME_API" is also defined here. In this case, the predecessor is "NTKINECTDLL_API".
Examples of the definition of variables, functions, and classes has already been inserted in the c++ file. Write you own definition referring those examples. As seen in examples, you must write "PROJECT_NAME_API" ("NTKINECTDLL_API" in this case) before your function definition. This predecessor is for the export/import switching.
Let's create a DLL library, NtKinectDLL, which supports almost full functions of NtKinect.
The name here is "NtKinectDLL". The solution name will automatically be "NtKinectDLL". OK -> Select "Next" and go to "Setting up the application"

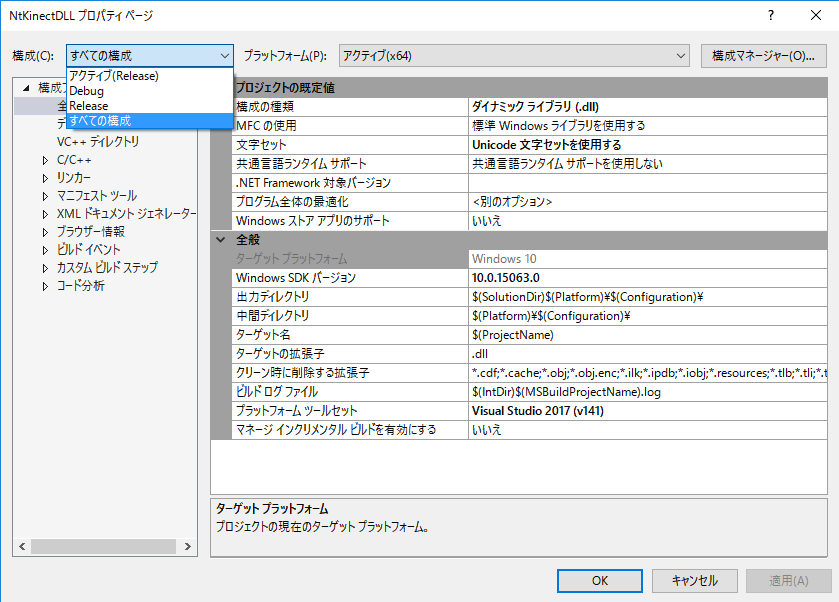
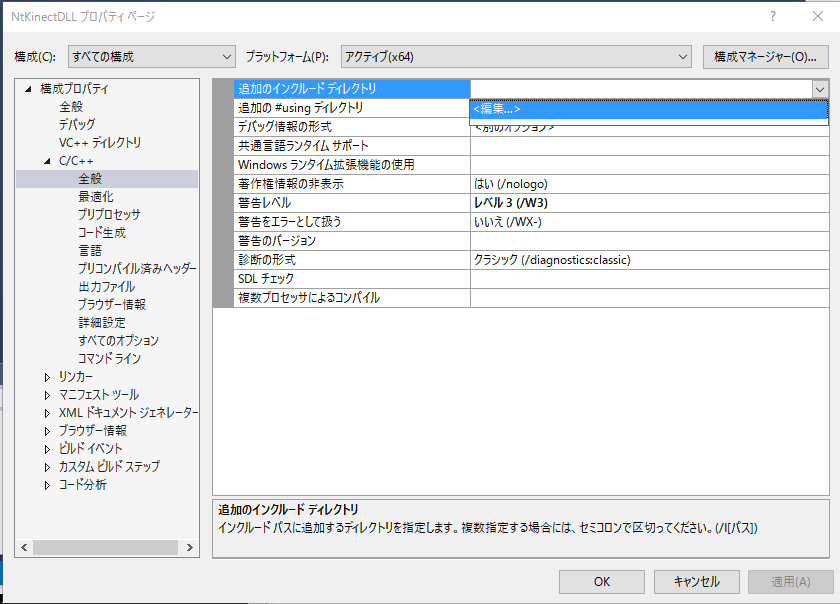
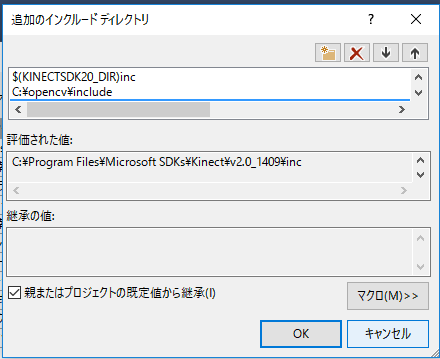
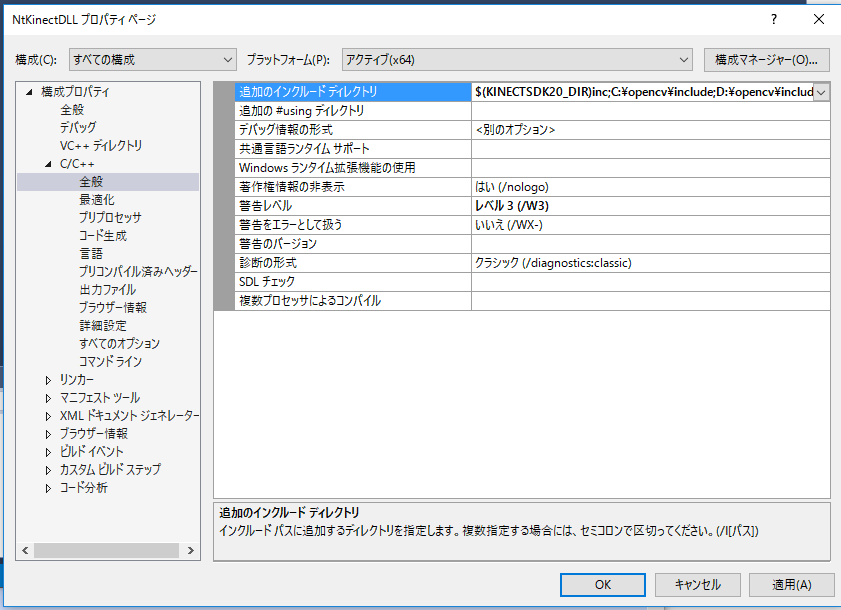
"Configuration Properties" -> "C/C++" -> "General" -> "Additional include directory"
$(KINECTSDK20_DIR)inc C:\opencv\include D:\opencv\include
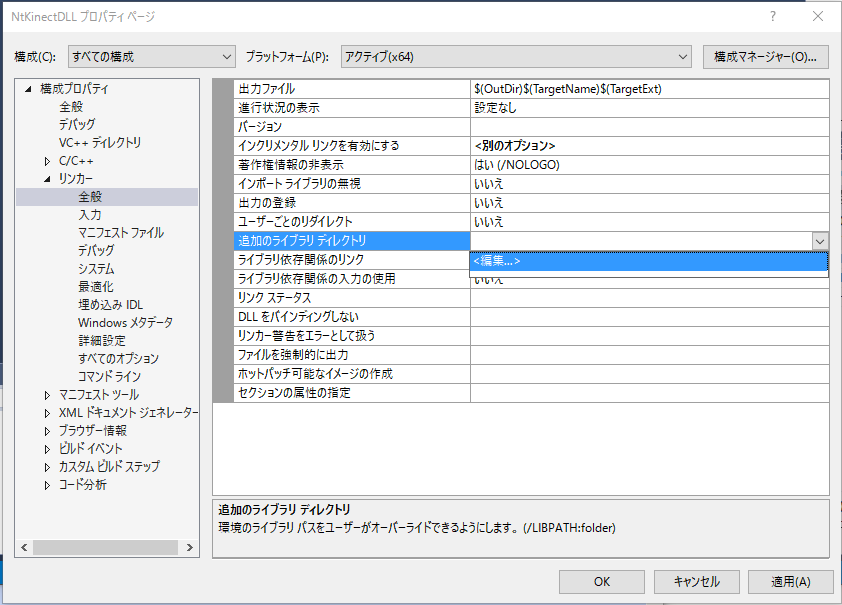
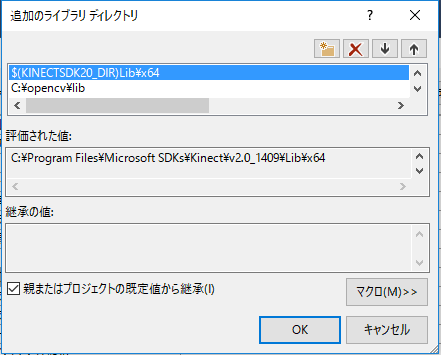
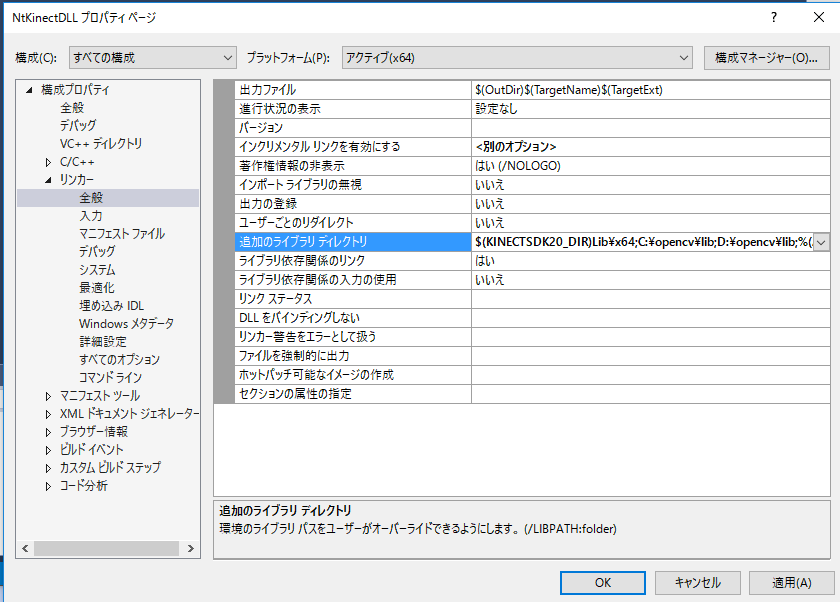
"Configuration Properties" -> "Linker" -> "General" -> "Additional library directory"
$(KINECTSDK20_DIR)Lib\x64 C:\opencv\lib D:\opencv\lib
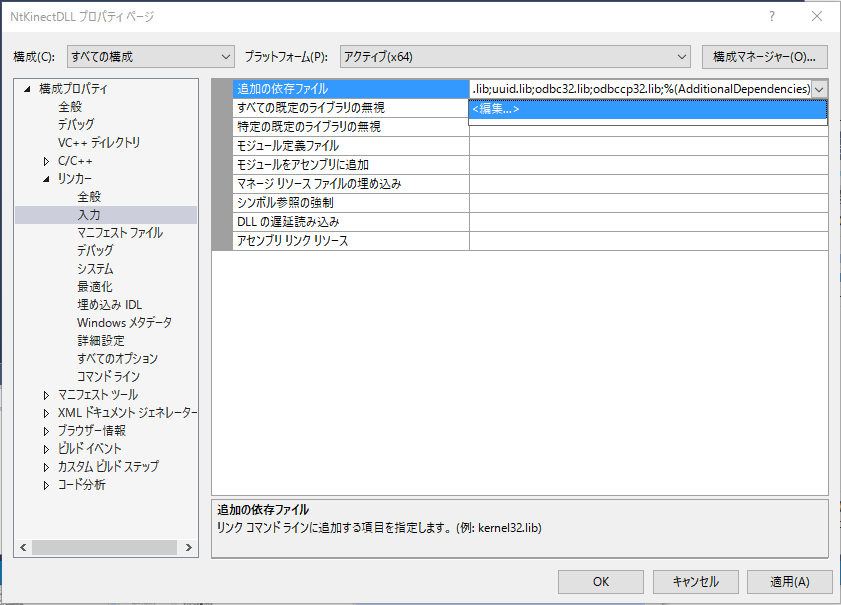
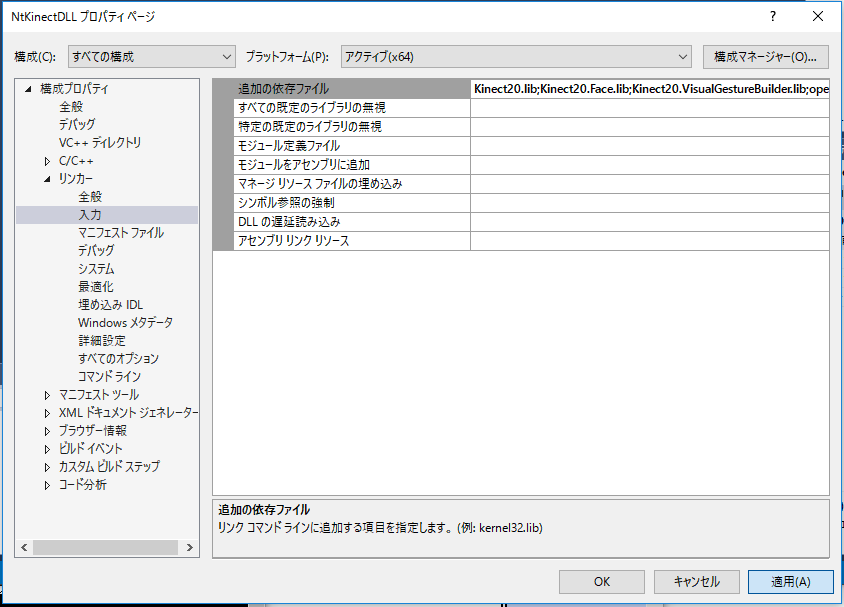
"Configuration Properties" -> "Linker" -> "General" -> "Input"
Kinect20.lib Kinect20.Face.lib Kinect20.VisualGestureBuilder.lib opencv_world330.lib

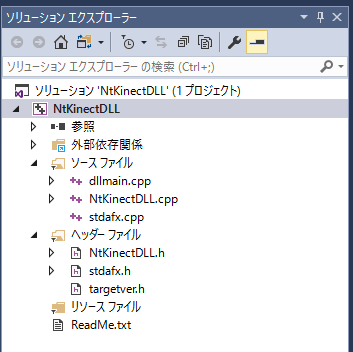
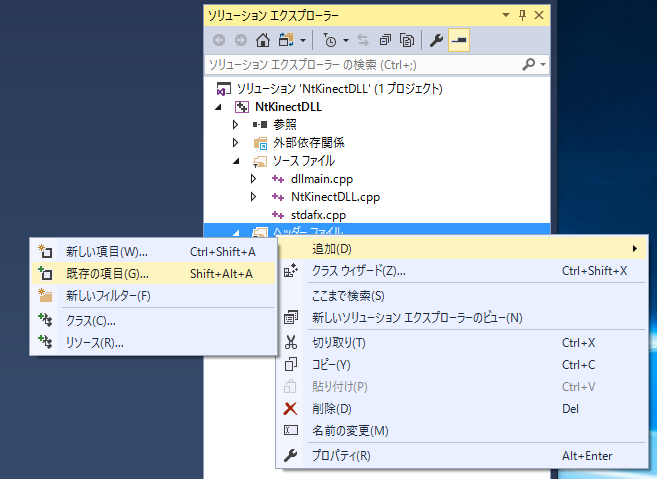
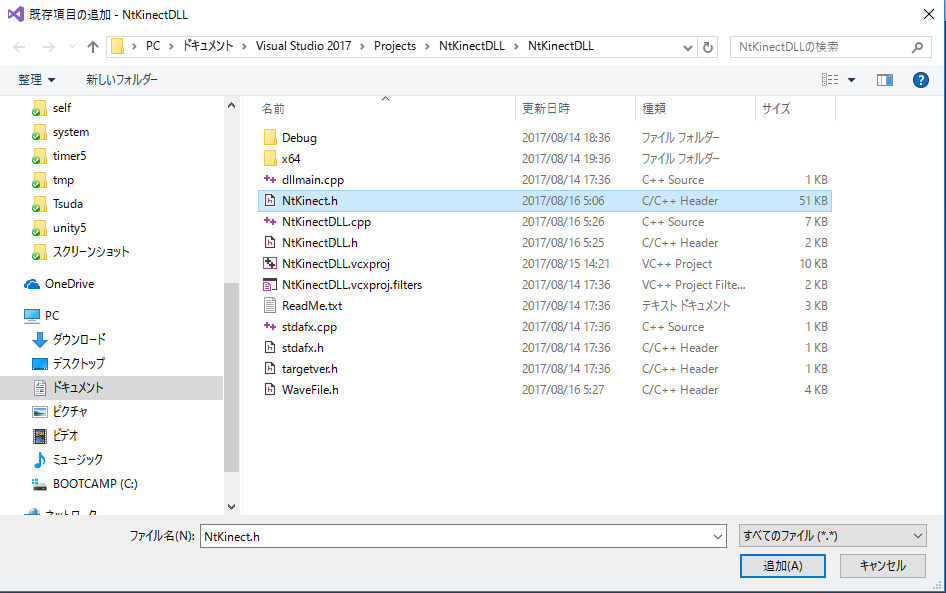
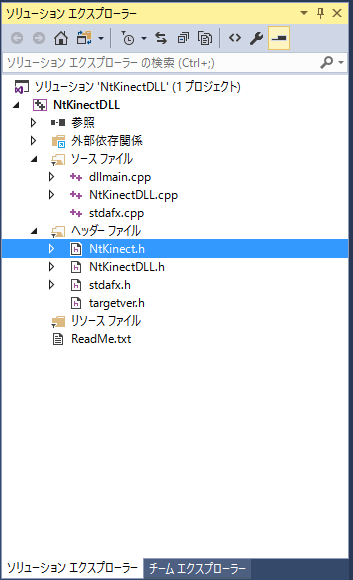
Please download NtKinet.h from the above link. Place NtKinect.h in the folder where the project's source files such as dllmain.cpp are located (NtKinectDll/NtKinectDll/ in this example). Right-click on "header file" of "Solution Explorer" and select "Add" -> "Select Existing Files" -> NtKinect.h.
Add "slightly modified WaveFile.h"
of AudioCaptureRaw-Console C++ Sample distributed by Microsoft
to the project.
Please download "WaveFile.h" from the above link.
Place WaveFile.h in the folder where the source, such as dllmain.cpp, is located.
In this case, the folder is "NtKinectDLL/NtKinectDLL/".
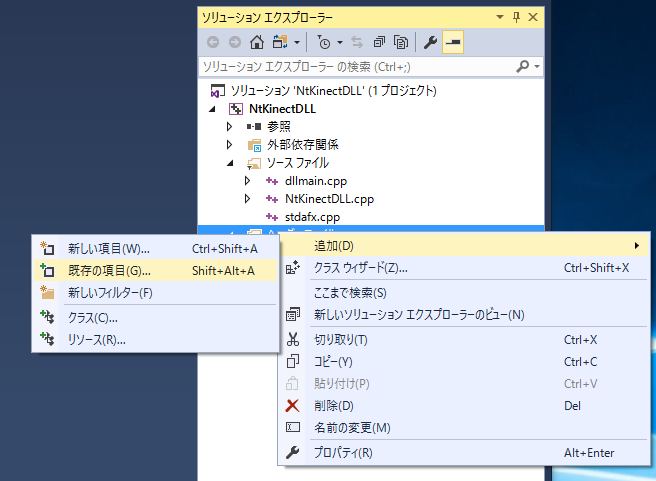
Right click on "Header file" of "Solution Explorer" and
select "Add" -> "Existing Item ..." -> "WaveFile.h".

| NtKinectDLL.h |
/*
* Copyright (c) 2017 Yoshihisa Nitta
* Released under the MIT license
* http://opensource.org/licenses/mit-license.php
*/
/*
* NtKinectDLL.h version 1.2.6: 2017/11/08
* http://nw.tsuda.ac.jp/lec/kinect2/NtKinectDLL
*
* requires:
* NtKinect version 1.8.2 and later
*/
#ifdef NTKINECTDLL_EXPORTS
#define NTKINECTDLL_API __declspec(dllexport)
#else
#define NTKINECTDLL_API __declspec(dllimport)
#endif
namespace NtKinectDLL {
extern "C" {
NTKINECTDLL_API void* getKinect(void);
NTKINECTDLL_API void stopKinect(void* ptr);
// OpenCV
NTKINECTDLL_API void imshow(void* ptr);
NTKINECTDLL_API void imshowBlack(void* ptr);
// CoordinateMapper
/*
NTKINECTDLL_API void mapCameraPointToColorSpace(void* ptr,void* sv,void* cv);
NTKINECTDLL_API void mapCameraPointToDepthSpace(void* ptr,void* sv,void* dv);
NTKINECTDLL_API void mapDepthPointToColorSpace(void* ptr,void* dv,UINT16 depth,void* cv);
NTKINECTDLL_API void mapDepthPointToCameraSpace(void* ptr,void* dv,UINT16 depth,void* sv);
*/
NTKINECTDLL_API void mapCameraPointToColorSpace(void* ptr, void* sv, void* cv, int n);
NTKINECTDLL_API void mapCameraPointToDepthSpace(void* ptr, void* sv, void* dv, int n);
NTKINECTDLL_API void mapDepthPointToColorSpace(void* ptr, void* dv, void* dth, void* cv, int n);
NTKINECTDLL_API void mapDepthPointToCameraSpace(void* ptr, void* dv, void* dth, void* sv, int n);
// Multi Thread
NTKINECTDLL_API void acquire(void* ptr);
NTKINECTDLL_API void release(void* ptr);
// Audio
NTKINECTDLL_API void setAudio(void* ptr, bool flag);
NTKINECTDLL_API float getBeamAngle(void* ptr);
NTKINECTDLL_API float getBeamAngleConfidence(void* ptr);
NTKINECTDLL_API unsigned __int64 getAudioTrackingId(void* ptr);
NTKINECTDLL_API void openAudio(void* ptr, wchar_t* filename);
NTKINECTDLL_API void closeAudio(void* ptr);
NTKINECTDLL_API bool isOpenedAudio(void* ptr);
// RGB
NTKINECTDLL_API void setRGB(void* ptr);
NTKINECTDLL_API int getRGB(void* ptr, void* data);
// Depth
NTKINECTDLL_API void setDepth(void* ptr);
NTKINECTDLL_API int getDepth(void* ptr, void* data);
// Infrared
NTKINECTDLL_API void setInfrared(void* ptr);
NTKINECTDLL_API int getInfrared(void* ptr, void* data);
// BodyIndex
NTKINECTDLL_API void setBodyIndex(void* ptr);
NTKINECTDLL_API int getBodyIndex(void* ptr, void* data);
// Skeleton
NTKINECTDLL_API void setSkeleton(void* ptr);
NTKINECTDLL_API int getSkeleton(void* ptr, void* skelton, void* state, void* id, void* tid);
NTKINECTDLL_API int handState(void* ptr, int id, bool isLeft);
// Face
NTKINECTDLL_API void setFace(void* ptr, bool flag);
NTKINECTDLL_API int getFace(void* ptr, float* point, float* rect, float* direction, int* property, void* tid);
// HDFace
NTKINECTDLL_API void setHDFace(void* ptr);
NTKINECTDLL_API int getHDFace(void* ptr, float* point, void* tid, int *status);
// Gesture
NTKINECTDLL_API void setGestureFile(void* ptr, wchar_t* filename);
NTKINECTDLL_API int setGestureId(void* ptr, wchar_t* name, int id); // id: non-zero
NTKINECTDLL_API void setGesture(void* ptr);
NTKINECTDLL_API int getDiscreteGesture(void* ptr, int* gid, float* confidence, void* tid);
NTKINECTDLL_API int getContinuousGesture(void* ptr, int* gid, float* progress, void* tid);
NTKINECTDLL_API int getGidMapSize();
// Video
NTKINECTDLL_API void openVideo(void* ptr, wchar_t* filename);
NTKINECTDLL_API void writeVideo(void* ptr);
NTKINECTDLL_API void closeVideo(void* ptr);
}
//Gesture
std::unordered_map<std::string, int> gidMap;
}
|
Please note that "NTKINECTDLL_API" must be written at the beginning of function definition.
In the DLL, the object must be allocated in the heap memory. For this reason, the void* getKinect() function instantiate a new NtKinect object on heap, and returns its pointer casting to (void *).
When executing a function of the DLL, the pointer to the NtKinect Object is given as an argument of type (void *). We cast it to a pointer of (NtKinect *) type and use NtKinect's function via it. For example, access to a member variable "rgbImage" is described as (*kinect).rgbImage.
| NtKinectDLL.cpp |
/*
* Copyright (c) 2017 Yoshihisa Nitta
* Released under the MIT license
* http://opensource.org/licenses/mit-license.php
*/
/*
* NtKinectDLL.h version 1.2.6: 2017/11/08
* http://nw.tsuda.ac.jp/lec/kinect2/NtKinectDLL
*
* requires:
* NtKinect version 1.8.2 and after
*/
#include "stdafx.h"
#include <unordered_map>
#ifndef NTKINECTDLL_EXPORTS
#define NTKINECTDLL_EXPORTS // cheap trick to avoid DLL Compiling Bug of "Visual Studio 2017 Update 2"
#endif
#include "NtKinectDLL.h"
#define USE_AUDIO
#define USE_FACE
#define USE_GESTURE
#define USE_THREAD
#include "NtKinect.h"
using namespace std;
namespace NtKinectDLL {
string wchar2string(wchar_t* name) {
int len = WideCharToMultiByte(CP_UTF8, NULL, name, -1, NULL, 0, NULL, NULL) + 1;
char* nameBuffer = new char[len];
memset(nameBuffer, '\0', len);
WideCharToMultiByte(CP_UTF8, NULL, name, -1, nameBuffer, len, NULL, NULL);
string s(nameBuffer);
return s;
}
NTKINECTDLL_API void* getKinect(void) {
NtKinect* kinect = new NtKinect();
return static_cast<void*>(kinect);
}
NTKINECTDLL_API void stopKinect(void* ptr) {
cv::destroyAllWindows();
NtKinect* kinect = static_cast<NtKinect*>(ptr);
delete kinect;
}
// OpenCV
NTKINECTDLL_API void imshow(void* ptr) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
int scale = 4;
cv::Mat img((*kinect).rgbImage);
cv::resize(img, img, cv::Size(img.cols / scale, img.rows / scale), 0, 0);
for (auto& person : (*kinect).skeleton) {
for (auto& joint : person) {
if (joint.TrackingState == TrackingState_NotTracked) continue;
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapCameraPointToColorSpace(joint.Position, &cp);
cv::rectangle(img, cv::Rect((int)cp.X / scale - 2, (int)cp.Y / scale - 2, 4, 4), cv::Scalar(0, 0, 255), 2);
}
}
for (auto r : (*kinect).faceRect) {
cv::Rect r2(r.x / scale, r.y / scale, r.width / scale, r.height / scale);
cv::rectangle(img, r2, cv::Scalar(255, 255, 0), 2);
}
cv::imshow("face", img);
cv::waitKey(1);
}
vector<cv::Rect> savedRect;
NTKINECTDLL_API void imshowBlack(void* ptr) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
int scale = 4;
cv::Mat img((*kinect).rgbImage);
cv::resize(img, img, cv::Size(img.cols / scale, img.rows / scale), 0, 0);
if ((*kinect).faceRect.size() == 0) {
for (auto& r : savedRect) {
(*kinect).faceRect.push_back(r);
}
}
else {
savedRect.clear();
for (auto& r : (*kinect).faceRect) {
savedRect.push_back(r);
}
}
for (auto r : (*kinect).faceRect) {
cv::Rect r2(r.x / scale, r.y / scale, r.width / scale, r.height / scale);
cv::rectangle(img, r2, cv::Scalar(0, 0, 0), -1);
}
for (auto& person : (*kinect).skeleton) {
for (auto& joint : person) {
if (joint.TrackingState == TrackingState_NotTracked) continue;
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapCameraPointToColorSpace(joint.Position, &cp);
cv::rectangle(img, cv::Rect((int)cp.X / scale - 2, (int)cp.Y / scale - 2, 4, 4), cv::Scalar(0, 0, 255), 2);
}
}
for (auto r : (*kinect).faceRect) {
cv::Rect r2(r.x / scale, r.y / scale, r.width / scale, r.height / scale);
cv::rectangle(img, r2, cv::Scalar(255, 255, 0), 2);
}
cv::imshow("face", img);
cv::waitKey(1);
}
// CoordinateMapper
/*
NTKINECTDLL_API void mapCameraPointToColorSpace(void* ptr,void* sv,void* cv) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
CameraSpacePoint sp; sp.X = ((float*)sv)[0]; sp.Y = ((float*)sv)[1]; sp.Z = ((float*)sv)[2];
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapCameraPointToColorSpace(sp,&cp);
((float*)cv)[0] = cp.X; ((float*)cv)[1] = cp.Y;
}
NTKINECTDLL_API void mapCameraPointToDepthSpace(void* ptr,void* sv,void* dv) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
CameraSpacePoint sp; sp.X = ((float*)sv)[0]; sp.Y = ((float*)sv)[1]; sp.Z = ((float*)sv)[2];
DepthSpacePoint dp;
(*kinect).coordinateMapper->MapCameraPointToDepthSpace(sp,&dp);
((float*)dv)[0] = dp.X; ((float*)dv)[1] = dp.Y;
}
NTKINECTDLL_API void mapDepthPointToColorSpace(void* ptr,void* dv,UINT16 depth,void* cv) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
DepthSpacePoint dp; dp.X = ((float*)dv)[0]; dp.Y = ((float*)dv)[1];
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapDepthPointToColorSpace(dp,depth,&cp);
((float*)cv)[0] = cp.X; ((float*)cv)[1] = cp.Y;
}
NTKINECTDLL_API void mapDepthPointToCameraSpace(void* ptr,void* dv,UINT16 depth,void* sv) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
DepthSpacePoint dp; dp.X = ((float*)dv)[0]; dp.Y = ((float*)dv)[1];
CameraSpacePoint sp;
(*kinect).coordinateMapper->MapDepthPointToCameraSpace(dp,depth,&sp);
((float*)sv)[0] = sp.X; ((float*)sv)[1] = sp.Y; ((float*)sv)[2] = sp.Z;
}
*/
NTKINECTDLL_API void mapCameraPointToColorSpace(void* ptr, void* sv, void* cv, int n) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* sa = (float*)sv;
float* ca = (float*)cv;
for (int i = 0; i<n; i++) {
CameraSpacePoint sp; sp.X = *sa++; sp.Y = *sa++; sp.Z = *sa++;
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapCameraPointToColorSpace(sp, &cp);
*ca++ = cp.X; *ca++ = cp.Y;
}
}
NTKINECTDLL_API void mapCameraPointToDepthSpace(void* ptr, void* sv, void* dv, int n) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* sa = (float*)sv;
float* da = (float*)dv;
for (int i = 0; i<n; i++) {
CameraSpacePoint sp; sp.X = *sa++; sp.Y = *sa++; sp.Z = *sa++;
DepthSpacePoint dp;
(*kinect).coordinateMapper->MapCameraPointToDepthSpace(sp, &dp);
*da++ = dp.X; *da++ = dp.Y;
}
}
NTKINECTDLL_API void mapDepthPointToColorSpace(void* ptr, void* dv, void* dth, void* cv, int n) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* da = (float*)dv;
UINT16* dth_addr = (UINT16*)dth;
float* ca = (float*)cv;
for (int i = 0; i<n; i++) {
DepthSpacePoint dp; dp.X = *da++; dp.Y = *da++;
ColorSpacePoint cp;
(*kinect).coordinateMapper->MapDepthPointToColorSpace(dp, *dth_addr++, &cp);
*ca++ = cp.X; *ca++ = cp.Y;
}
}
NTKINECTDLL_API void mapDepthPointToCameraSpace(void* ptr, void* dv, void* dth, void* sv, int n) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* da = (float*)dv;
UINT16* dth_addr = (UINT16*)dth;
float* sa = (float*)sv;
for (int i = 0; i<n; i++) {
DepthSpacePoint dp; dp.X = *da++; dp.Y = *da++;
CameraSpacePoint sp;
(*kinect).coordinateMapper->MapDepthPointToCameraSpace(dp, *dth_addr++, &sp);
*sa++ = sp.X; *sa++ = sp.Y; *sa++ = sp.Z;
}
}
// Multi Thread
NTKINECTDLL_API void acquire(void* ptr) { (*static_cast<NtKinect*>(ptr)).acquire(); }
NTKINECTDLL_API void release(void* ptr) { (*static_cast<NtKinect*>(ptr)).release(); }
// Audio
NTKINECTDLL_API void setAudio(void* ptr, bool flag) { (*static_cast<NtKinect*>(ptr)).setAudio(flag); }
NTKINECTDLL_API float getBeamAngle(void* ptr) { return (*static_cast<NtKinect*>(ptr)).beamAngle; }
NTKINECTDLL_API float getBeamAngleConfidence(void* ptr) { return (*static_cast<NtKinect*>(ptr)).beamAngleConfidence; }
NTKINECTDLL_API unsigned __int64 getAudioTrackingId(void* ptr) { return (*static_cast<NtKinect*>(ptr)).audioTrackingId; }
NTKINECTDLL_API void openAudio(void* ptr, wchar_t* filename) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
(*kinect).openAudio(wchar2string(filename));
}
NTKINECTDLL_API void closeAudio(void* ptr) { (*static_cast<NtKinect*>(ptr)).closeAudio(); }
NTKINECTDLL_API bool isOpenedAudio(void* ptr) { return (*static_cast<NtKinect*>(ptr)).isOpenedAudio(); }
// RGB
NTKINECTDLL_API void setRGB(void* ptr) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
(*kinect).setRGB();
}
NTKINECTDLL_API int getRGB(void* ptr, void* data) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
char* idx = (char*)data;
for (int y = 0; y<(*kinect).rgbImage.rows; y++) {
for (int x = 0; x<(*kinect).rgbImage.cols; x++) {
cv::Vec4b& pxl = (*kinect).rgbImage.at<cv::Vec4b>(y, x);
*idx++ = pxl[2]; // Red
*idx++ = pxl[1]; // Green
*idx++ = pxl[0]; // Blue
*idx++ = pxl[3]; // Alpha
}
}
return (int)(idx - (char*)data);
}
// Depth
NTKINECTDLL_API void setDepth(void* ptr) { (*static_cast<NtKinect*>(ptr)).setDepth(); }
NTKINECTDLL_API int getDepth(void* ptr, void* data) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
UINT16* idx = (UINT16*)data;
for (int y = 0; y<(*kinect).depthImage.rows; y++) {
for (int x = 0; x<(*kinect).depthImage.cols; x++) {
*idx++ = (*kinect).depthImage.at<UINT16>(y, x);
}
}
return (int)(idx - (UINT16*)data);
}
// Infrared
NTKINECTDLL_API void setInfrared(void* ptr) { (*static_cast<NtKinect*>(ptr)).setInfrared(); }
NTKINECTDLL_API int getInfrared(void* ptr, void* data) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
UINT16* idx = (UINT16*)data;
for (int y = 0; y<(*kinect).infraredImage.rows; y++) {
for (int x = 0; x<(*kinect).infraredImage.cols; x++) {
*idx++ = (*kinect).infraredImage.at<UINT16>(y, x);
}
}
return (int)(idx - (UINT16*)data);
}
// bodyIndex
NTKINECTDLL_API void setBodyIndex(void* ptr) { (*static_cast<NtKinect*>(ptr)).setBodyIndex(); }
NTKINECTDLL_API int getBodyIndex(void* ptr, void* data) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
char* idx = (char*)data;
for (int y = 0; y<(*kinect).bodyIndexImage.rows; y++) {
for (int x = 0; x<(*kinect).bodyIndexImage.cols; x++) {
*idx++ = (*kinect).bodyIndexImage.at<char>(y, x);
}
}
return (int)(idx - (char*)data);
}
// Skeleton
NTKINECTDLL_API void setSkeleton(void* ptr) { (*static_cast<NtKinect*>(ptr)).setSkeleton(); }
NTKINECTDLL_API int getSkeleton(void* ptr, void* skel, void* skelState, void* skelId, void* skelTrackingId) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* skeleton = (float*)skel;
int* state = (int*)skelState;
int* id = (int*)skelId;
UINT64* trackingId = (UINT64*)skelTrackingId;
int idx = 0, jt = 0, st = 0;
for (auto& person : (*kinect).skeleton) {
for (auto& joint : person) {
skeleton[jt++] = joint.Position.X;
skeleton[jt++] = joint.Position.Y;
skeleton[jt++] = joint.Position.Z;
state[st++] = joint.TrackingState;
}
id[idx] = (*kinect).skeletonId[idx];
trackingId[idx] = (*kinect).skeletonTrackingId[idx];
idx++;
}
return idx;
}
NTKINECTDLL_API int handState(void* ptr, int id, bool isLeft) { return (*static_cast<NtKinect*>(ptr)).handState(id, isLeft).first; }
// Face
NTKINECTDLL_API void setFace(void* ptr, bool isColorSpace) { (*static_cast<NtKinect*>(ptr)).setFace(isColorSpace); }
NTKINECTDLL_API int getFace(void* ptr, float* point, float* rect, float* direction, int* property, void* tid) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float* p = point;
for (auto& face : (*kinect).facePoint) {
for (auto& pt : face) {
*p++ = pt.X;
*p++ = pt.Y;
}
}
int np = (int)(p - point) / 2;
p = rect;
for (auto& r : (*kinect).faceRect) {
*p++ = (float)r.x;
*p++ = (float)r.y;
*p++ = (float)r.width;
*p++ = (float)r.height;
}
int nr = (int)(p - rect) / 4;
p = direction;
for (auto& d : (*kinect).faceDirection) {
*p++ = d[0];
*p++ = d[1];
*p++ = d[2];
}
int nd = (int)(p - direction) / 3;
int* a = (int*)property;
for (auto& face : (*kinect).faceProperty) {
for (auto& prop : face) {
*a++ = prop;
}
}
int npr = (int)(a - property);
UINT64* q = (UINT64*)tid;
for (auto& t : (*kinect).faceTrackingId) {
*q++ = t;
}
int nt = (int)(q - (UINT64*)tid);
return min(nt, min(min(npr, nd), min(nr, np)));
}
// HDFace
NTKINECTDLL_API void setHDFace(void* ptr) { (*static_cast<NtKinect*>(ptr)).setHDFace(); }
NTKINECTDLL_API int getHDFace(void* ptr, float* point, void* tid, int* status) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
float *p = (float*)point;
for (auto& person : (*kinect).hdfaceVertices) {
for (auto& cp : person) {
*p++ = cp.X;
*p++ = cp.Y;
*p++ = cp.Z;
}
}
UINT64 *q = (UINT64*)tid;
for (auto& t : (*kinect).hdfaceTrackingId) {
*q++ = t;
}
int* r = (int*)status;
for (auto& s : (*kinect).hdfaceStatus) {
*r++ = s.first;
*r++ = s.second;
}
return (int)(*kinect).hdfaceVertices.size();
}
// Gesture
NTKINECTDLL_API void setGestureFile(void* ptr, wchar_t* filename) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
wstring fname(filename);
(*kinect).setGestureFile(fname);
}
NTKINECTDLL_API int setGestureId(void* ptr, wchar_t* name, int id) {
int len = WideCharToMultiByte(CP_UTF8, NULL, name, -1, NULL, 0, NULL, NULL) + 1;
char* nameBuffer = new char[len];
memset(nameBuffer, '\0', len);
WideCharToMultiByte(CP_UTF8, NULL, name, -1, nameBuffer, len, NULL, NULL);
string s(nameBuffer);
gidMap[s] = id;
return id;
}
NTKINECTDLL_API void setGesture(void* ptr) { (*static_cast<NtKinect*>(ptr)).setGesture(); }
NTKINECTDLL_API int getDiscreteGesture(void* ptr, int* gid, float* confidence, void *tid) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
UINT64* trackingId = (UINT64*)tid;
for (int i = 0; i<(*kinect).discreteGesture.size(); i++) {
auto g = (*kinect).discreteGesture[i];
string gname = (*kinect).gesture2string(g.first);
gid[i] = gidMap[gname];
confidence[i] = g.second;
trackingId[i] = (*kinect).discreteGestureTrackingId[i];
}
return (int)(*kinect).discreteGesture.size();
}
NTKINECTDLL_API int getContinuousGesture(void* ptr, int* gid, float* progress, void *tid) {
NtKinect* kinect = static_cast<NtKinect*>(ptr);
UINT64* trackingId = (UINT64*)tid;
for (int i = 0; i<(*kinect).continuousGesture.size(); i++) {
auto g = (*kinect).continuousGesture[i];
string gname = (*kinect).gesture2string(g.first);
gid[i] = gidMap[gname];
progress[i] = g.second;
trackingId[i] = (*kinect).continuousGestureTrackingId[i];
}
return (int)(*kinect).continuousGesture.size();
}
NTKINECTDLL_API int getGidMapSize() {
return (int)gidMap.size();
}
// Video
cv::VideoWriter *videoWriter = nullptr;
cv::Size videoSize;
bool videoOnSave = false;
NTKINECTDLL_API void openVideo(void* ptr, wchar_t* filename) {
NtKinect *kinect = static_cast<NtKinect*>(ptr);
string fname = wchar2string(filename);
if (videoOnSave) {
std::cerr << "cannot open two video files simultaneously" << std::endl;
return;
}
videoSize = cv::Size(1920 / 4, 1080 / 4);
// rename CV_FOURCC_MACRO as cv::VideoWriter::fourcc (in case of opencv3 and later)
videoWriter = new cv::VideoWriter(fname, CV_FOURCC_MACRO('X', 'V', 'I', 'D'), 30.0, videoSize);
if (!(*videoWriter).isOpened()) {
std::cerr << "cannot open video file" << std::endl;
return;
}
videoOnSave = true;
}
NTKINECTDLL_API void writeVideo(void* ptr) {
NtKinect *kinect = static_cast<NtKinect*>(ptr);
cv::Mat img;
if (videoOnSave) {
cv::resize((*kinect).rgbImage, img, videoSize, 0, 0);
// rename CV_BGRA2BGR as cv::COLOR_BGRA2BGR (in case of opencv3 and later)
cv::cvtColor(img, img, CV_BGRA2BGR);
(*videoWriter) << img;
}
}
NTKINECTDLL_API void closeVideo(void* ptr) {
if (videoOnSave) {
(*videoWriter).release();
delete videoWriter;
videoWriter = nullptr;
videoOnSave = false;
}
}
}
|
[Caution] Do just "Compile", "Build", or "Rebuild". Do not "Run" or "Debug" here. Since we have not write the program body, an meaningless error will occur if you try to "Run" or "Debug".
[Caution2] ".dll" and ".lib" files are generated in the "x64/Release/" folder immediately under the project, that is, "(ProjectName)/x64/Release". Do not search wrong folders like "(ProjectName)/NtKinectDll/x64/Release".
Since the above zip file may not include the latest "NtKinect.h", Download the latest version from here and replace old one with it.