In the article " NtKinect: How to make Kinect V2 program as DLL and use it from Unity ", it is explained how to create a DLL file that uses the basic functions of OpenCV and Kinect V2 via NtKinect, and use it from other programs and Unity.
Well, the programs that recognize face, speech and gesture with Kinect V2 require some additional DLL files corresponding to each function at execution time. Here, I will explain
how to make your own NtKinect program as a DLL, when the program uses the Kinect V2 function which needs some other DLLs and setting files,and
How to use your NtKinect DLL from other languages/environments as C#/Unity, for example.
In this article, we will explain how to create a DLL file for face recognition.
Let's craete a DLL library that perform face recognition as an example of Kinect V2 functions that actually requieres other DLLs and additional files.
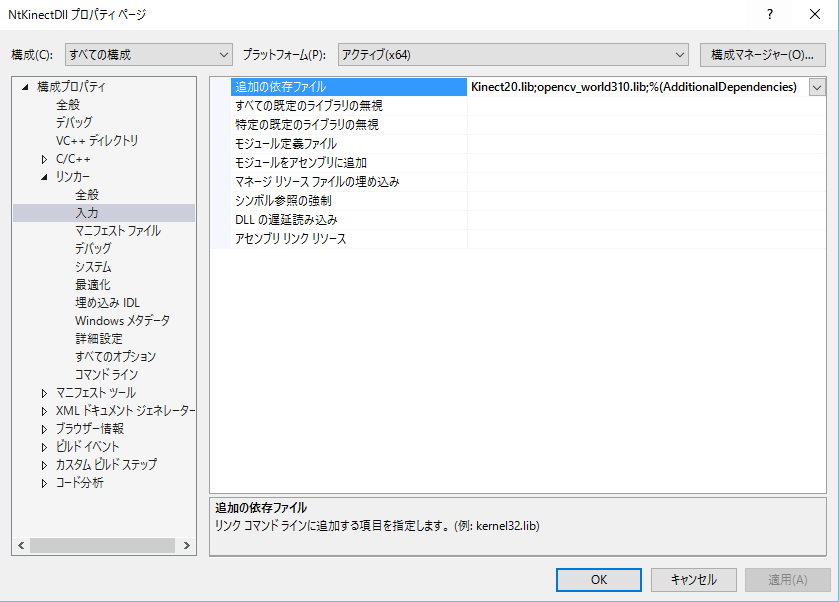
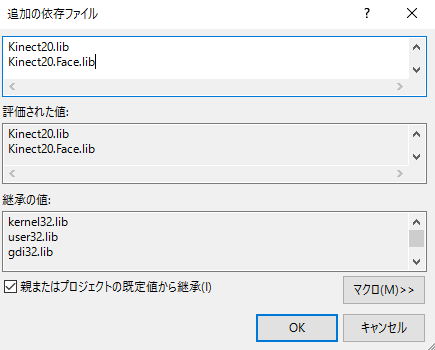
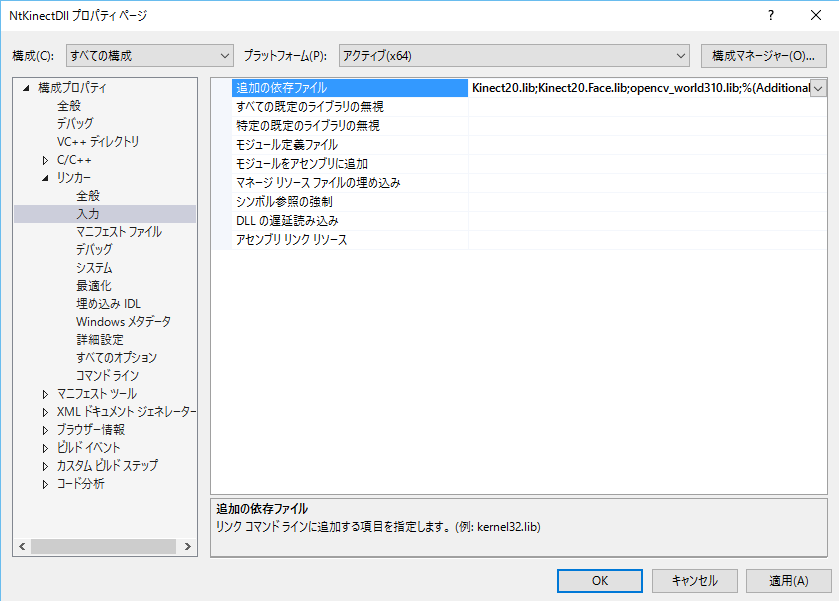
"Configuration Properties" -> "Linker" -> "General" -> "Input"
Kinect20.Face.lib
The magenta color part is the prototype declaration of the function added this time.
| NtKinectDll.h |
#ifdef NTKINECTDLL_EXPORTS
#define NTKINECTDLL_API __declspec(dllexport)
#else
#define NTKINECTDLL_API __declspec(dllimport)
#endif
extern "C" {
NTKINECTDLL_API void* getKinect(void);
NTKINECTDLL_API int faceDirection(void* ptr, float* dir);
}
|
At first, define USE_FACE constant before including NtKinect.h. When you define USE_FACE, the program must be linked "Kinect20.Face.lib" library.
Then, add the function definition of int faceDirection(void *, float *). In this function, the image acquired by the RGB camera is reduced to 1/16, and is displayed with cv::imshow(). On the image, the joints are drawn in red, and a cyan rectangle is drawn around the recognized face. Notice that calling cv::waitKey(1) is needed to display the OpenCV window properly. Since the direction of the face is three float values of pitch, yaw, and roll, and 6 people may be recognized, so the data area should be allocated more than "sizeof(float) * 3 * 6" bytes on the caller side. Return value is the number of recognized faces.
| NtKinectDll.cpp |
#include "stdafx.h" #include "NtKinectDll.h" #define USE_FACE #include "NtKinect.h" using namespace std; NTKINECTDLL_API void* getKinect(void) { NtKinect* kinect = new NtKinect; return static_cast<void*>(kinect); } NTKINECTDLL_API int faceDirection(void* ptr,float *dir) { NtKinect *kinect = static_cast<NtKinect*>(ptr); (*kinect).setRGB(); (*kinect).setSkeleton(); (*kinect).setFace(); int scale = 4; cv::Mat img((*kinect).rgbImage); cv::resize(img,img,cv::Size(img.cols/scale,img.rows/scale),0,0); for (auto person: (*kinect).skeleton) { for (auto joint: person) { if (joint.TrackingState == TrackingState_NotTracked) continue; ColorSpacePoint cp; (*kinect).coordinateMapper->MapCameraPointToColorSpace(joint.Position,&cp); cv::rectangle(img, cv::Rect((int)cp.X/scale-2, (int)cp.Y/scale-2,4,4), cv::Scalar(0,0,255),2); } } for (auto r: (*kinect).faceRect) { cv::Rect r2(r.x/scale,r.y/scale,r.width/scale,r.height/scale); cv::rectangle(img, r2, cv::Scalar(255, 255, 0), 2); } cv::imshow("face",img); cv::waitKey(1); int idx=0; for (auto d: (*kinect).faceDirection) { dir[idx++] = d[0]; dir[idx++] = d[1]; dir[idx++] = d[2]; } return (*kinect).faceDirection.size(); } |
[Caution](Oct/07/2017 added) If you encounter "dllimport ..." error when building with Visual Studio 2017 Update 2, please refer to here and deal with it to define NTKINECTDLL_EXPORTS in NtKinectDll.cpp.
Since the above zip file may not include the latest "NtKinect.h", Download the latest version from here and replace old one with it.
Let's create a simple project to confirm that the generated DLL file works properly.
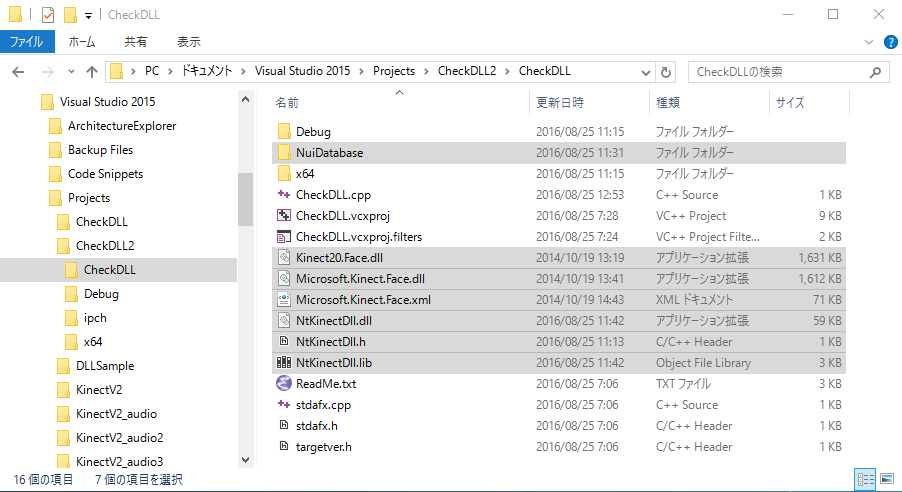
Copy the new NtKinectDll.h onto the old NtKinectDll.h in the folder where the project source files as stdafx.cpp or CheckDLL.cpp are located.
Copy the new NtKinectDll.dll and NtKinectDll.lib onto the old ones the folder where the project source files as stdafx.cpp or CheckDLL.cpp are located.
Copy all the file under the $(KINECTSDK20_DIR)Redist\Face\x64\。 to the folder where the project source files as stdafx.cpp or CheckDLL.cpp are located. With the standard settings, $(KINECTSDK20_DIR) should be C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\ . ("V2.0_version number" depends on the version of SDK you are using).
$(KINECTSDK20_DIR)Redist\Face\x64\NuiDatabase\
\Kinect20.Face.lib
\Microsoft.Kinect.Face.lib
\Microsoft.Kinect.Face.xml
|
Allocate 18 float data to call faceDirection(void*,float*);.
The second argument of the function is the data area for the face orientation up to 6 people.
| CheckDLL.cpp |
#include "stdafx.h"
#include <iostream>
#include <sstream>
#include "NtKinectDll.h"
using namespace std;
int main() {
void* kinect = getKinect();
float dir[6*3];
while (1) {
int ret = faceDirection(kinect, dir);
if (ret) {
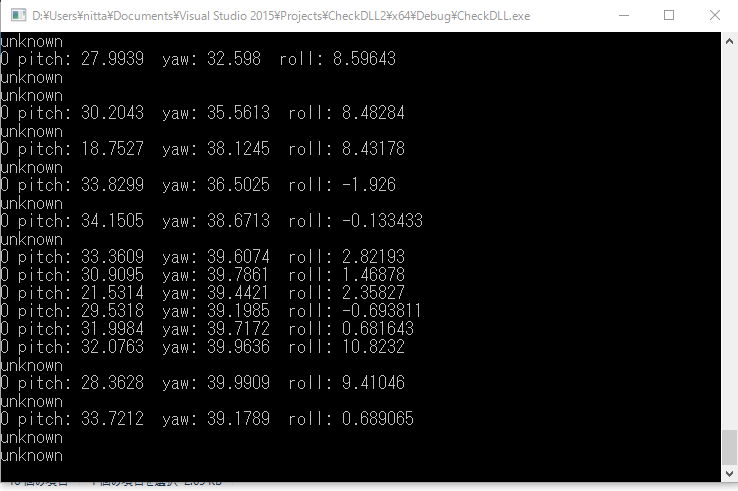
for (int i=0; i<ret; i++) {
cout << i << " pitch: " << dir[i*3+0] << " "
<< "yaw: " << dir[i*3+1] << " "
<< "roll: " << dir[i*3+2] << endl;
}
} else {
cout << "unknown" << endl;
}
}
return 0;
}
|
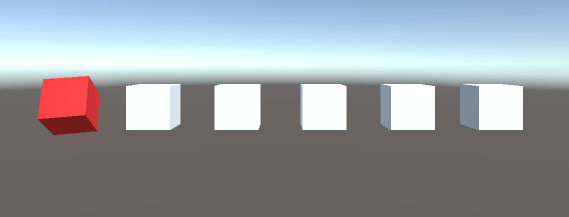
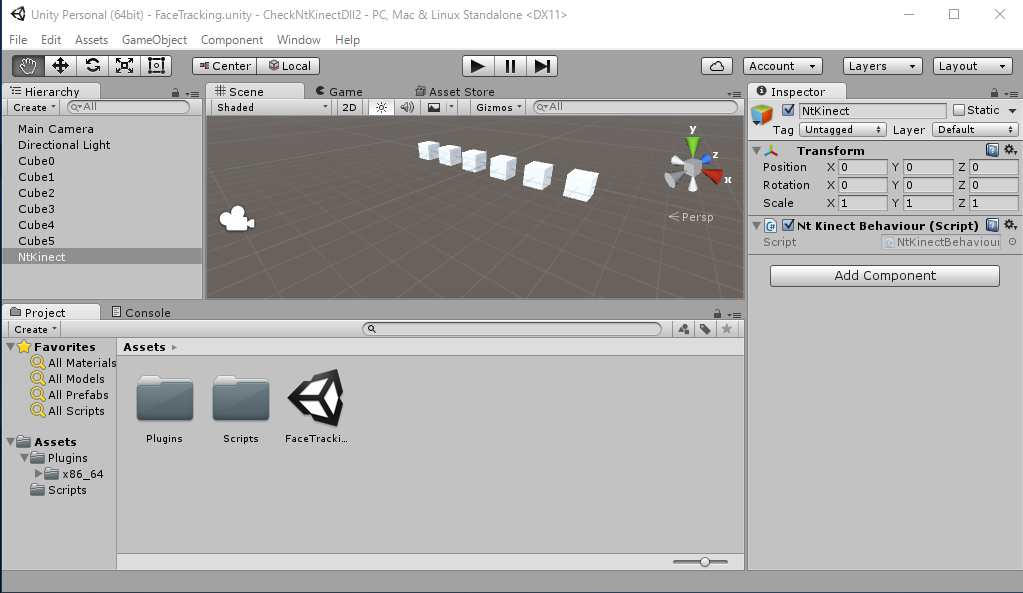
Let's use NtKinectDll.dll in Unity.
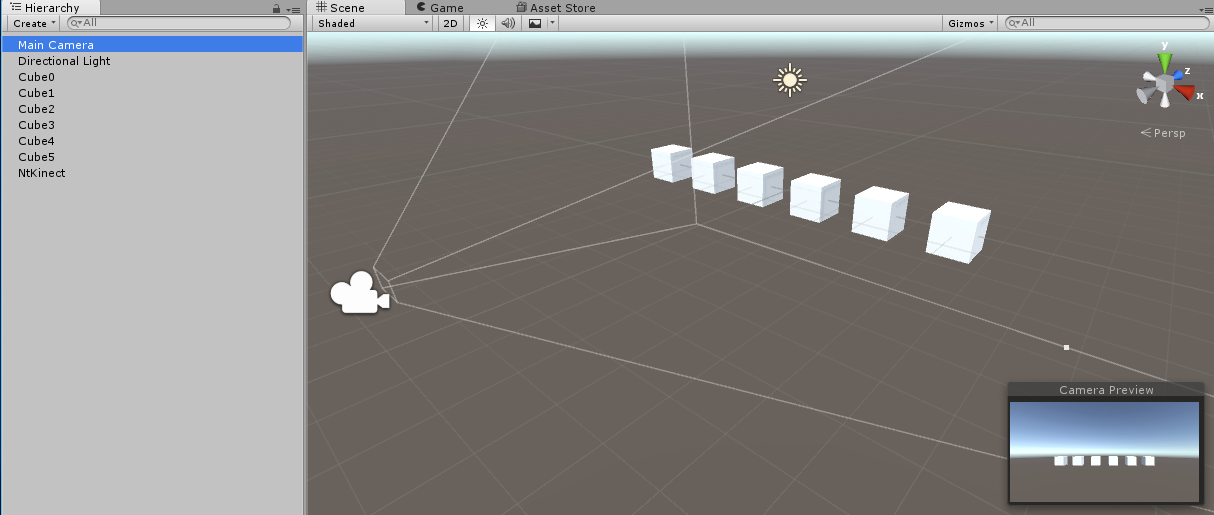
From the upper menu, "Game Object"-> "3D Object" -> "Cube"
Move the 6 Cubes as follows. There is no need to move the camera, since the camera views all the 6 Cubes from the default position.
| name | Position | Rotation | Scale | ||||||
|---|---|---|---|---|---|---|---|---|---|
| x | y | z | x | y | z | x | y | z | |
| Cube0 | -5 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| Cube1 | -3 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| Cube2 | -1 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| Cube3 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| Cube4 | 3 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| Cube5 | 5 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| Main Camera | 0 | 1 | -10 | 0 | 0 | 0 | 1 | 1 | 1 |
From the top menu, "Assets"-> "Create" -> "C# Script" -> Filename is "NtKinectBehaviour"
The pointers in C++ are treated as System.IntPtr in C#.
| NtKinectBehaviour.cs |
using UnityEngine;
using System.Collections;
using System.Runtime.InteropServices;
public class NtKinectBehaviour : MonoBehaviour {
[DllImport ("NtKinectDll")] private static extern System.IntPtr getKinect();
[DllImport ("NtKinectDll")] private static extern int rightHandState(System.IntPtr kinect);
[DllImport ("NtKinectDll")] private static extern int faceDirection(System.IntPtr kinect, System.IntPtr data);
private System.IntPtr kinect;
int bodyCount = 6;
GameObject[] obj;
int counter;
void Start () {
kinect = getKinect();
obj = new GameObject[bodyCount];
obj[0] = GameObject.Find("Cube0");
obj[1] = GameObject.Find("Cube1");
obj[2] = GameObject.Find("Cube2");
obj[3] = GameObject.Find("Cube3");
obj[4] = GameObject.Find("Cube4");
obj[5] = GameObject.Find("Cube5");
}
public static Quaternion ToQ (float pitch, float yaw, float roll) {
yaw *= Mathf.Deg2Rad;
pitch *= Mathf.Deg2Rad;
roll *= Mathf.Deg2Rad;
float rollOver2 = roll * 0.5f;
float sinRollOver2 = (float)System.Math.Sin ((double)rollOver2);
float cosRollOver2 = (float)System.Math.Cos ((double)rollOver2);
float pitchOver2 = pitch * 0.5f;
float sinPitchOver2 = (float)System.Math.Sin ((double)pitchOver2);
float cosPitchOver2 = (float)System.Math.Cos ((double)pitchOver2);
float yawOver2 = yaw * 0.5f;
float sinYawOver2 = (float)System.Math.Sin ((double)yawOver2);
float cosYawOver2 = (float)System.Math.Cos ((double)yawOver2);
Quaternion result;
result.w = cosYawOver2 * cosPitchOver2 * cosRollOver2 + sinYawOver2 * sinPitchOver2 * sinRollOver2;
result.x = cosYawOver2 * sinPitchOver2 * cosRollOver2 + sinYawOver2 * cosPitchOver2 * sinRollOver2;
result.y = sinYawOver2 * cosPitchOver2 * cosRollOver2 - cosYawOver2 * sinPitchOver2 * sinRollOver2;
result.z = cosYawOver2 * cosPitchOver2 * sinRollOver2 - sinYawOver2 * sinPitchOver2 * cosRollOver2;
return result;
}
void Update () {
float[] data = new float[bodyCount * 3];
GCHandle gch = GCHandle.Alloc(data,GCHandleType.Pinned);
int n = faceDirection(kinect,gch.AddrOfPinnedObject());
gch.Free();
counter = (n != 0) ? 10 : System.Math.Max(0,counter-1);
for (int i=0; i<bodyCount; i++) {
if (i<n) {
obj[i].transform.rotation = ToQ(data[i*3+0],data[i*3+1],data[i*3+2]);
obj[i].GetComponent<Renderer>().material.color = new Color(1.0f,0.0f,0.0f,1.0f);
} else if (counter == 0) {
obj[i].transform.rotation = Quaternion.identity;
obj[i].GetComponent<Renderer>().material.color = new Color(1.0f,1.0f,1.0f,1.0f);
}
}
}
}
|
Even if the face is being recognized, it often happens that face recognition fails momentaly. In such a case the cube moves severely and it is difficult to see, so we are doing a simple error handling to make tracking failure only when the recognition fails ten consecutive times (with the variable counter ). To handle correctly, we should receive faceTrackingId and judge for each face, but I keep it simple way to avoid complicated explanation code.
[Notice] We generates an OpenCV window in DLL to display the skeleton recognition state. Note that when the OpenCV window is focused, that is, when the Unity game window is not focused, the screen of Unity will not change. Click on the top of Unity's window and make it focused, then try the program's behaviour.